B
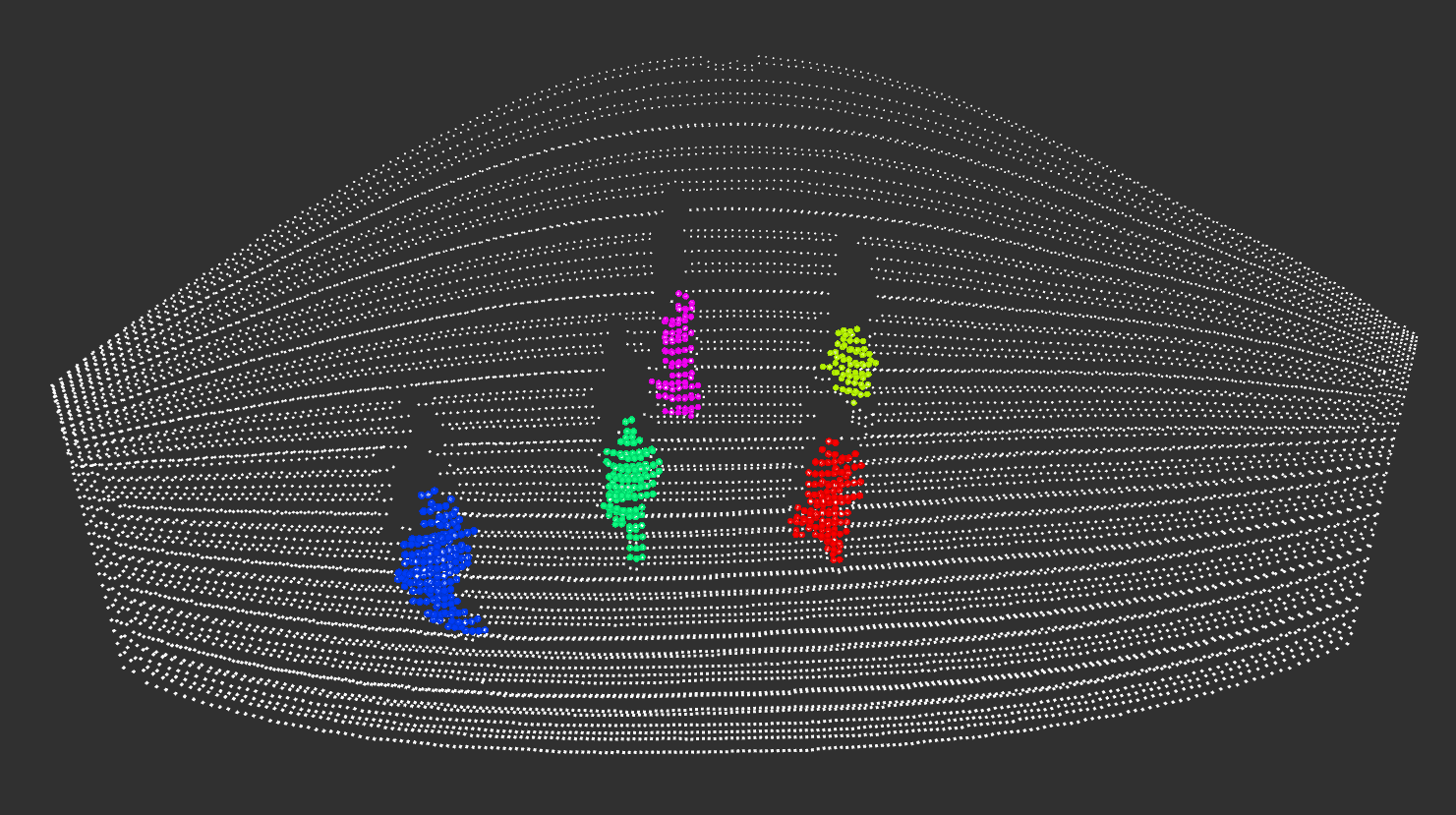
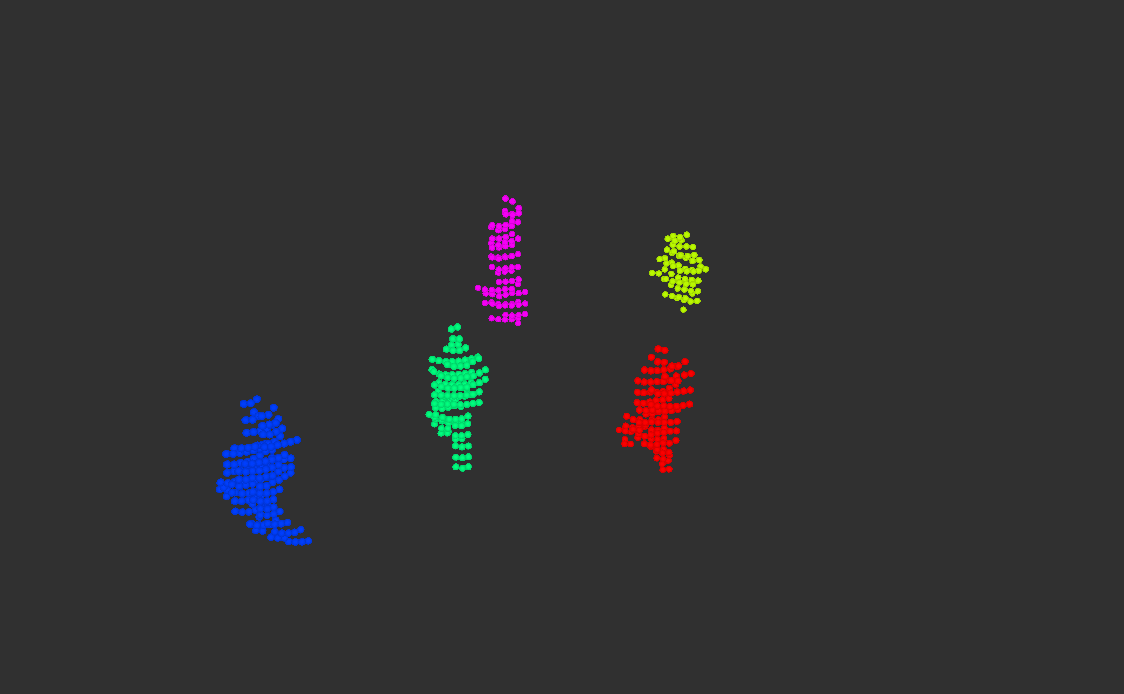
Background subtraction
Background subtraction is a widely used approach for detecting moving objects in point clouds captured by static LiDARs. For real-time detection and recognition it is crucial to reduce the amount of data to be processed and to be able to segment different objects. This is achieved by removing the background of a point cloud and extracting the foreground.
Beam deflection unit
The beam deflection unit is a core component of scanning LiDARs. It directs the laser pulses over the entire field of view. This is done using e.g. mechanical or micro-electromechanical system technologies. Blickfeld uses a silicon-based (MEMS) beam deflection unit. (link https://www.blickfeld.com/blog/mems-technology-for-lidar/)
Beam divergence
Diode laser emitted beams increase their beam diameter with distance from the emitter, which is called beam divergence, meaning they are cone-shaped with a small opening angle. The beam divergence measures the increase in beam diameter or radius starting at the optical aperture from which the beam exits.
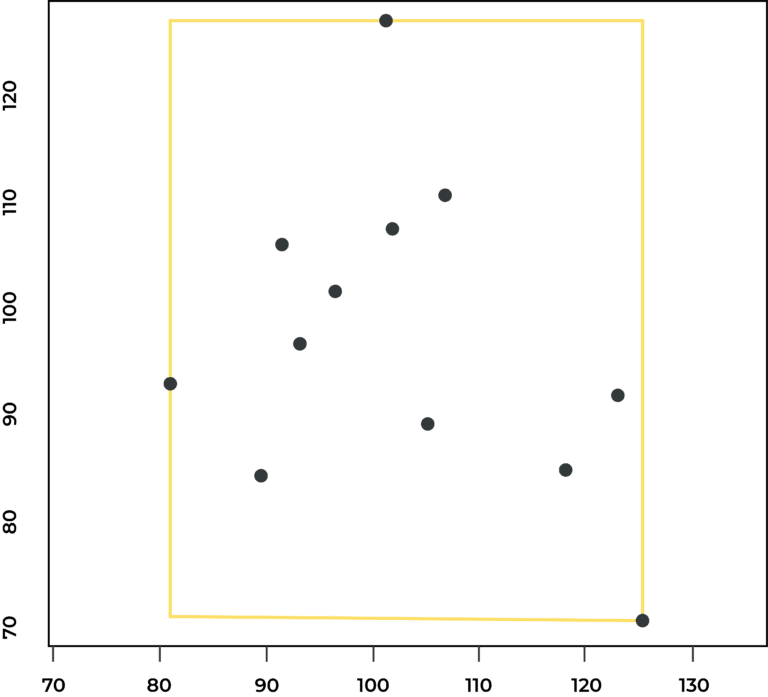
Bounding box
A bounding box is a simple geometric body that encloses a complex three-dimensional object. Bounding boxes are used to abstract objects in point clouds and are mainly used to simplify visualisation and speed up computation.
C
Coaxial design (monostatic design)
A coaxial design means that the axes of the laser beam and the receiver optics coincide. Thus, emitted laser rays are returned back to the detector on identical paths. Thanks to the coaxial setup, daylight, background light or beams of other sensors are suppressed and a high signal-to-noise ratio is achieved.
Collimation
Collimation describes light with low divergence. Perfectly collimated light would mean parallel beams and plane wavefronts. Due to diffraction this is not possible in reality. In LiDAR systems usually the size of the emitter and the limited available optical aperture limit collimation.
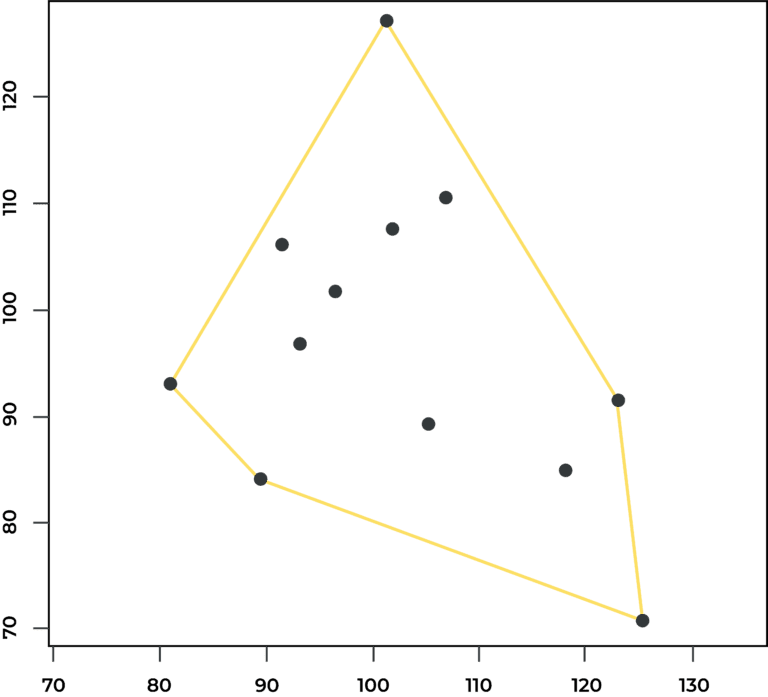
Convex hull
The convex hull describes the smallest possible circumference of a body by connecting the outermost points of the object.
Cross-talk
If multiple laser pulses (e.g from multiple LiDAR sensors) are emitted at the same time, the detector may not be able to distinguish between signals, resulting in erroneous range measurements and 3D points. To mitigate cross-talk effects, Blickfeld makes use of spectral filtering and spatial filtering.
D
Detection Range
The range refers to the distance up to which a sensor can detect objects and cover the environment.
F
Field of view
The field of view refers to the area that is covered by a LiDAR sensor at any given moment within which objects, movements etc. can be detected and recorded.
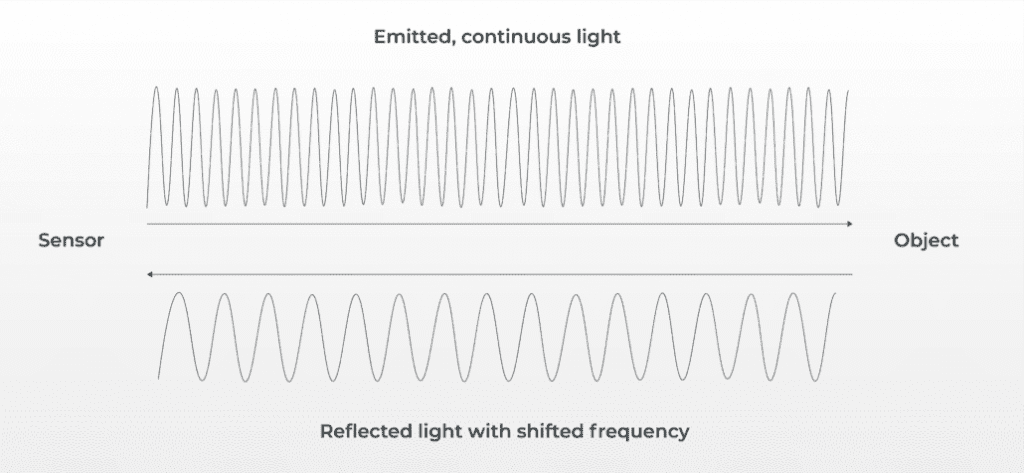
Frequency Modulated Continuous Wave (FMCW)
Frequency Modulated Continuous Wave (FMCW) method can be employed to simultaneously measure distance to and relative velocity of targets. Alternative to the pulsed Time-of-Flight method, it is based on coherent detection of a continuous, frequency modulated signal. The information on the distance and velocity (from Doppler effect) is contained in the frequency difference between the emitted and received signals.
Frame rate
The frame rate describes the frequency (in fps or Hz) at which consecutive images (frames) occur during a certain time period.
L
Laser class
Laser classes are established to provide laser safety through a framework for clustering technical gadgets into risk-related categories. Risks are to be minimized by close monitoring. The laser classes vary in their recommendations for action but all have the aim of safeguarding the right use of lasers. Class 1 lasers are safe under all conditions of normal use.
LiDAR / 3D LiDAR
LiDAR (acronym for Light Detection and Ranging) is an active distance measurement method, which provides detailed 3D information for reliable environment perception. LiDAR sensors measure distance to a target using the time of flight principle, for example.
M
MEMS
Short for micro electro mechanical systems, refers to miniaturized mechanical and electro-mechanical elements that are made using the techniques of microfabrication. Silicon MEMS mirrors are used in LiDAR sensors to steer the laser beam. This is called scanning and generates the LiDAR’s field of view. MEMS mirrors do not have freely moving mechanical components and therefore show no friction or abrasion effects resulting in superior reliability and count as quasi solid-state systems.
P
Photodetector
Photodetector is a hypernym for detectors that convert photons into electrical current or display an electrical resistance depending on the angle of light incidence under action of the photoelectrical effect. Examples are photodiodes, APDs, SPADs and SiPMs.
Point cloud
A point cloud is a series of data points in space. By continuously emitting laser pulses and detecting their reflected beams, 3D sensors create point clouds. Each point contains precise information about its position in space and in many cases further information on reflectivity, ambient light, and time values.
Pulsed laser
A pulsed laser does not emit light continuously but pulsed in time-limited portions. These portions are the laser pulses.
R
Range resolution
The range resolution describes the ability to distinguish between two or more targets which are close in range of each other.
Range precision
Range precision describes the degree of consistency between measured values obtained by measuring a target multiple times under defined conditions.
Range accuracy
Accuracy indicates how close a given measurement is to the real value. Range accuracy is a measure of the proximity of the measured target distance to its true distance.
S
Scan lines
Scanning LiDARs conduct subsequent measurements, each comprising of only single or a couple of points in space in the same direction. A complete horizontal sweep consisting of multiple scanned points is referred to as scan line.
Signal-to-noise ratio
The signal-to-noise ratio indicates the quality of a signal. The power of a signal is compared to the level of background noise and expressed in decibels. Ratios higher than 1:1 signify that there is more signal than noise.
Silicon photomultipliers (SiPMs)
Silicon photomultipliers are single-photon-sensitive devices based on arrays of parallell-connected SPADs. They provide high precision measurement at low operating voltages resulting in a large dynamic bandwith.
Solid-state LiDAR
Solid-state LiDAR is a form of LiDAR that does not contain freely moving mechanical parts resulting in advantages in dimension, weight and costs as well as a higher degree of robustness.
SPAD detector
Single-Photon Avalanche Diodes are solid-state photodetectors. They can detect extremely low intensity signals and indicate the photon arrival time with high temporal precision.
Spatial filtering
The Blickfeld setup is coaxial. As a result, only the photons from the exact direction in which the laser was sent are collected. This spatial filtering supresses straylight, achieving a high signal-to-noise ratio.
Spectral filtering
Spectral filters are used to selectively transmit light according to its wavelength. Blickfeld employs a laser diode emitter operating at a wavelength of 905 nm. A filter in front of the detector only lets light of similar wavelengths pass, thereby mitigating cross-talk by lasers operating at different wavelenghts.
Straylight
Straylight is a signal which is detected during a measurement at measurement points in addition to the actual measurement signal and thereby distorts the measurement. Such straylight might arise due to dirt, dust, damages in optics or light sources such as other LiDARs.
T
Time-of-flight measurement
The time of flight measurement is a method for measuring the distance between sensor and an detected object. Based on the delay measurement in the return of an emitted signal from an object, the ToF principle measures the distance between it and the sensor. Running time of the light is proportional to the distance covered as light spreads at constant speed.
V
Volumetric Detection
Volumetric detection involves utilizing sensors or systems to monitor a designated three-dimensional space for the presence, movement, or unauthorized entry of objects or individuals. Unlike traditional monitoring methods that focus on flat surfaces or perimeters, volumetric detection encompasses an entire area, accounting for width, height, and depth. This approach provides comprehensive coverage and enhances the ability to identify potential threats within a defined volume.
3D LiDAR sensors are suitable for volumetric detection as they create detailed point cloud representations of the environment. By emitting laser pulses to measure distances, these sensors enable precise detection of movement and intrusion across the entire monitored area. The three-dimensional spatial data captured by 3D LiDAR allows for the establishment of virtual 3D security zones, which can be configured to trigger alerts or notifications when unauthorized activity occurs within these defined areas.