B
Bildrate
Die Framerate bezeichnet die Frequenz (in fps oder Hz) mit der aufeinanderfolgende Bilder (Frames) in einem bestimmten zeitlichen Intervall aufgenommen werden.
C
Cross-talk
Wenn mehrere Laserpulse (z.B. von mehreren LiDAR-Sensoren) zur gleichen Zeit emittiert werden, kann der Detektor möglicherweise nicht zwischen den Signalen unterscheiden, was zu fehlerhaften Entfernungsmessungen und 3D-Punkten führt. Um Cross-talk Effekte abzuschwächen, verwendet Blickfeld spektrale Filterung und räumliche Filterung.
D
Divergenz
Ausgesendete Strahlen verlaufen nicht parallel, sondern mit einem sehr kleinen Winkel. Sie sind also kegelförmig mit einem kleinen Öffnungswinkel. Die Strahldivergenz misst diese Vergrößerung des Strahldurchmessers angefangen an der optischen Blende, aus der der Strahl austritt.
E
Entfernungsauflösung
Die Entfernungsauflösung beschreibt die Fähigkeit, zwischen zwei oder mehr Zielen zu unterscheiden, die nahe beieinander liegen.
Entfernungsgenauigkeit
Die Genauigkeit gibt an, wie nahe eine gegebene Messung am tatsächlichen Wert liegt. Die Entfernungsgenauigkeit ist ein Maß für die Nähe des gemessenen Zielabstands zu seinem wahren Abstand.
Entfernungspräzision
Die Entfernungspräzision beschreibt den Grad der Übereinstimmung zwischen Messwerten, die durch mehrmaliges Messen eines Ziels unter definierten Bedingungen erhalten werden.
F
Festkörper LiDAR
Festkörper-LiDAR ist eine Form von LiDAR, die ohne mechanisch freibewegliche Teile auskommt, was zu Vorteilen bei Abmessungen, Gewicht und Kosten sowie zu einer höheren Robustheit führt.
H
Hintergrundsubtraktion
Die Hintergrundsubtraktion ist ein weit verbreiteter Ansatz zur Erkennung bewegter Objekte in Punktwolken aus statischen LiDARs. Für eine echtzeitfähige Detektion und Erkennung ist es entscheidend, die zu verarbeitende Datenmenge zu reduzieren und verschiedene Objekte segmentieren zu können. Dies wird erzielt, indem der Hintergrund einer Punktwolke entfernt wird und der Vordergrund extrahiert wird.
K
Koaxiales Design (Monostatisches Design)
Ein koaxialer Aufbau bedeutet, dass die Achsen des Laserstrahls und der Empfängeroptik übereinstimmen. Emittierte Laserstrahlen werden also auf dem selben Weg zurück zum Empfänger geleitet. Dank des koaxialen Aufbaus werden Tageslicht, Umgebungslicht oder die Strahlen anderer Sensoren unterdrückt und ein hohes Signal-Rausch-Verhältnis erzielt.
Kollimierung
Kollimierung beschreibt die Ausbreitung von Licht mit geringer Divergenz. Perfekt kollimiertes Licht würde eine Ausbreitung mit parallelen Strahlen und ebenen Wellenfronten vollziehen. Die Beugung des Lichts macht dies jedoch unmöglich. In LiDAR-Systemen beschränken sowohl die Größe des Emitters als auch die limitierte optische Apertur Kollimierung.
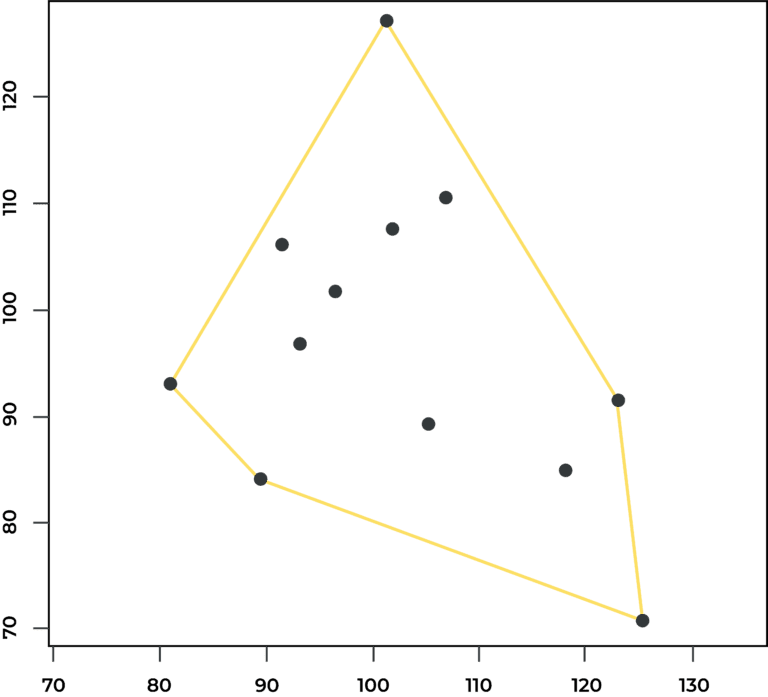
Konvexe Hülle
Die konvexe Hülle beschreibt den kleinstmöglichen Umfang eines Körpers, indem sie die äußersten Punkte des Objektes miteinander verbindet.
L
Laserklasse
Laserschutzklassen wurden eingeführt, um Lasersicherheit mittels einer Rahmenordnung, die technische Geräte in Risikokategorien einordnet, zu gewährleisten. Unfallrisiken sollen durch die Überwachung von Risiken minimiert werden. Die Laserklassen variieren in ihren Handlungsempfehlungen, haben jedoch alle das Ziel den richtigen Umgang mit Lasern sicherzustellen. Laser der Klasse 1 sind unter allen Bedingungen des normalen Gebrauchs sicher.
Laserpuls
Ein Laserpuls ist nicht stetig emittiertes Licht, sondern wird in zeitlich-limitierten Portionen, den Pulsen, ausgesendet.
Laufzeitmessung
Die Laufzeitmessung ist ein Verfahren zur Entfernungs- und Geschwingigkeitsmessung. Basierend auf der Verzögerungsmessung in der Rückkehr eines emittierten Signals von einem Objekt, misst das ToF-Prinzip die Distanz zwischen diesem und dem Sensor. Die Laufzeit des Lichtes ist proportional zu der zurückgelegten Distanz, da sich Licht mit konstanter Geschwindigkeit ausbreitet.
LiDAR / 3D LiDAR
LiDAR (Abkürzung für Light Detection and Ranging) ist eine Methode zur aktiven Entfernungsmessung, welche detaillierte 3D-Informationen für zuverlässige Umfeldwahrnehmung bereitstellt. Beispielsweise durch das Prinzip der Laufzeitmessung messen LiDAR-Sensoren die Distanz zu einem Objekt.
M
MEMS
Kurz für Mikro-Elektronisch-Mechanische Systeme, bezieht sich auf miniaturisierte mechanische und elektro-mechanische Elemente, die mit den Techniken der Mikrofabrikation hergestellt werden. Die Silizium-MEMS-Spiegel, die in LiDAR-Sensoren verwendet werden, lenken den Laserstrahl in den freien Raum und scannen dabei das gesamte Sichtfeld. Sie tun dies, ohne optische Komponenten zu bewegen, daher gelten MEMS LiDAR Sensoren als Quasi-Festkörper-LiDAR. Dank ausbleibender Reibungs- oder Abriebeffekte, haben Festkörper-LiDAR eine höhere Robustheit.
P
Photodetektor
Überbegriff für Detektoren, die mit dem Photoeffekt ein Lichtsignal (Photon) in ein elektrisches Signal umwandeln oder je nach Einfallwinkel des Lichtes einen elektrischen Widerstand anzeigen. Beispiele sind Photodioden, APDs, SPADs und SiPMs.
Punktwolke
Eine Punktwolke ist eine Reihe von Datenpunkten im Raum. Durch kontinuierliche Aussendung von Laserpulsen und Detektion deren reflektierter Strahlen, erstellen 3D Sensoren Punktwolken. Jeder Punkt beinhaltet dabei genaue Informationen zur Position im Raum sowie oftmals zu Refketivität, Umgebungslicht und Zeitangaben.
Q
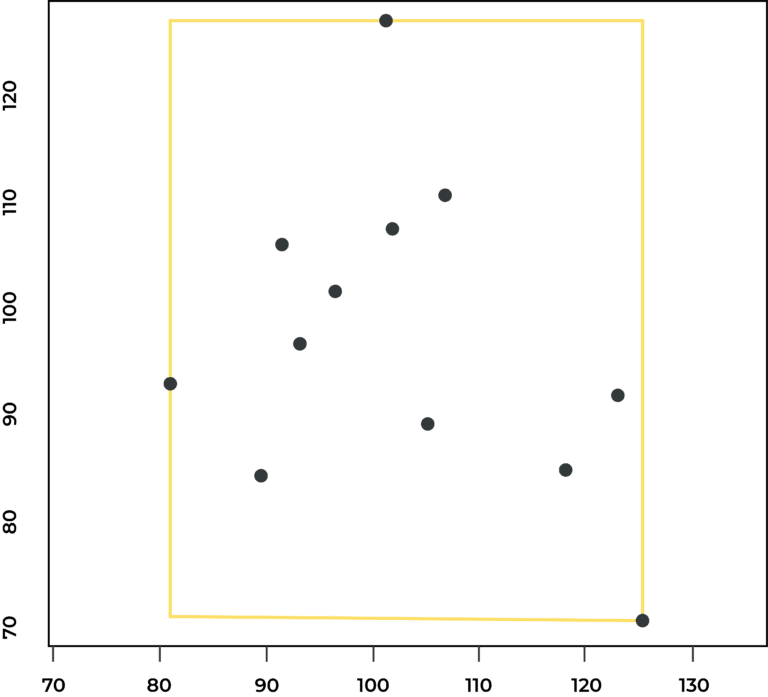
Quaderförmige Hüllkörper
Ein quadratischer Hüllkörper ist ein einfacher geometrischer Körper, der ein komplexes dreidimensionales Object umschließt. Objekte in Punktwolken werden dadurch abstrahiert. Hüllkörper werden meist verwendet, damit Daten leichter verarbeitet werden können.
R
Räumliche Filterung
Der Blickfeld-Aufbau ist koaxial. Als Folge davon werden nur die Photonen aus genau der Richtung gesammelt, in die der Laser geschickt wurde. Diese räumliche Filterung entfernt unerwünschtes Streulicht und sorgt so für ein gutes Signal-Rausch-Verhältnis.
Reichweite
Die Reichweite bezieht sich auf die Distanz bis zu welcher ein Sensor Objekte erkennen und das Umfeld erfassen kann.
S
Scanlinie
Scanning-LiDARs führen aufeinander folgende Messungen durch, die jeweils nur aus einem oder mehreren Punkten im Raum in derselben Richtung bestehen. Eine einzelne horizontale Abtastung zusammengesetzt aus mehreren gescannten Punkten der Szene wird als Scanlinie bezeichnet.
Sichtfeld
Das Sichtfeld bezeichnet den Bereich, den ein LiDAR-Sensor zu einem bestimmten Zeitpunkt abdeckt und innerhalb dessen Objekte, Bewegungen etc. detektiert und aufgezeichnet werden können.
Signal-to-noise ratio
Das Signal-Rausch-Verhältnis zeigt die technische Qualität eines Signals an. Die Stärke eines Signals wird mit dem Level von Hintergrundrauschen verglichen und in Dezibel angegeben. Größenverhältnisse größer als 1:1 bedeuten, dass mehr Signal als Rauschen (Störung) vorliegt.
Silizium-Photoelektronenvervielfacher (SiPMs)
Silizium-Photoelektronenvervielfacher sind einzelphotonenempfindliche Arrays aus parallel geschalteten SPADs. Sie verfügen über eine hohe Präzision beim Messen unter niedrigen Betriebsspannungen und liefern eine große dynamische Bandbreite.
SPAD-Detektor
SPADs (Single-Photon Avalanche Diodes) sind optische Festkörper-Detektoren, die Signale niedriger Intensität mit hoher zeitlicher Genauigkeit detektieren und erfassen können.
Spektralfilterung
Spektralfilter werden verwendet, um Licht entsprechend seiner Wellenlänge selektiv durchzulassen. Blickfeld verwendet einen Laserdiodenemitter, der bei einer Wellenlänge von 905 nm arbeitet. Ein Filter vor dem Detektor lässt nur Licht ähnlicher Wellenlängen durch, wodurch Cross-talk von Lasern, die mit abweichenden Wellenlängen arbeiten, vermieden wird.
Strahlablenkungseinheit
Die Strahlablenkungseinheit ist eine Kernkomponente von Scanning-LiDARs, die die Laserpulse über das gesamte Sichtfeld lenkt. Hierfür kommen beispielsweise mechanische oder mikro-elektromechanischer Systemtechnologien zum Einsatz. Blickfeld nutzt eine siliziumbasierte (MEMS-)Strahlablenkungseinheit. (Link https://www.blickfeld.com/de/blog/im-herzen-der-sensoren-mems-technologie-fuer-lidar/)
Streulicht
Streulicht ist ein Signal welches bei einer Messung bei Messpunkten zusätzlich zum eigentlichen Messsignal detektiert wird und die Messung dadurch verfälscht. Dieses Streulicht kann durch Schmutz, Staub, Beschädigungen in der Optik oder Lichtquellen wie anderen LiDARs entstehen.
V
Volumetrische Überwachung
Die volumetrische Überwachung nutzt Sensoren oder Systeme, um einen dreidimensionalen Raum hinsichtlich der Anwesenheit, Bewegung oder unbefugten Eindringens von Objekten oder Personen zu überwachen. Im Gegensatz zu herkömmlichen Überwachungsmethoden, die sich auf flache Oberflächen oder Umrisse konzentrieren, erfasst die volumetrische Überwachung den gesamten Raum, indem sie Breite, Höhe und Tiefe berücksichtigt. Dieser Ansatz gewährleistet eine umfassende Abdeckung und verbessert die Fähigkeit, potenzielle Bedrohungen innerhalb eines definierten Volumens zu identifizieren.
3D-LiDAR-Sensoren sind besonders geeignet für die volumetrische Überwachung, da sie präzise Punktwolkendarstellungen der Umgebung erzeugen. Durch das Aussenden von Laserimpulsen zur Entfernungsmessung ermöglichen diese Sensoren eine exakte Erkennung von Bewegungen und Eindringlingen im gesamten überwachten Bereich. Die von 3D-LiDAR erfassten dreidimensionalen Raumdaten erlauben die Einrichtung virtueller 3D-Sicherheitszonen. Diese Zonen können so konfiguriert werden, dass sie Alarme oder Benachrichtigungen auslösen, wenn innerhalb der definierten Bereiche unerlaubte Aktivitäten stattfinden.