Blickfeld's LiDAR sensor technology is exactly what we were looking for in terms of price, resolution, and field of view.
Matthias Blumenschein
Research Assistant Rail Vehicle Engineering, FH Aachen University of Applied Sciences
To monitor the track area when shunting freight trains even when reversing, a consortium consisting of five partners, including FH Aachen, is developing a system for track monitoring – the SAMIRA Shunting Assistant System. This involves fusing LiDAR point clouds with camera data to detect objects in the track reliably. This digitization step saves personnel resources and, at the same time, lays the foundation for autonomous rail operations.
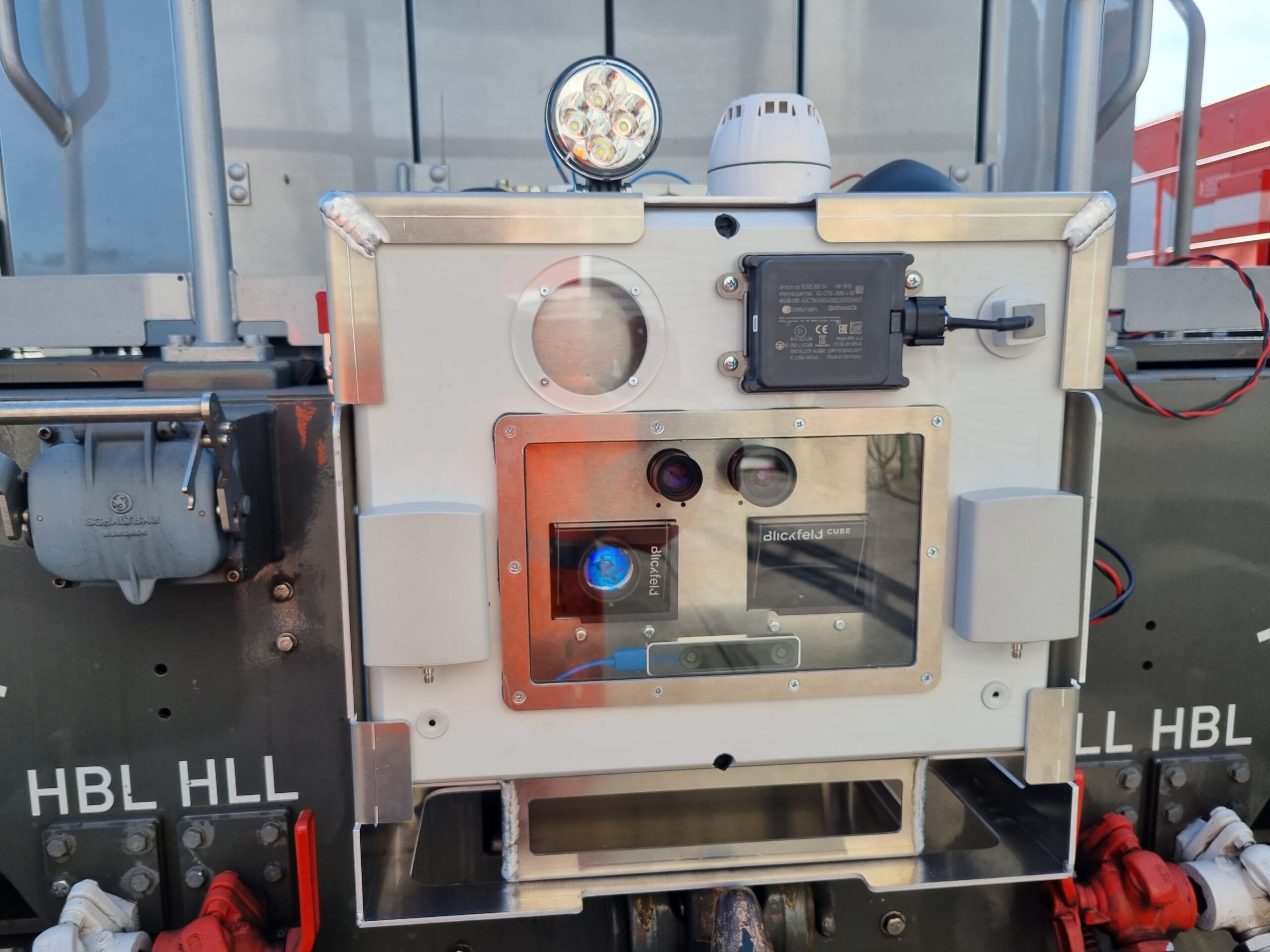
Therefore, the project team is developing an assistance system for shunting freight trains that takes over track monitoring and thus supports the locomotive drivers. This portable, battery-powered device is attached to the end of the train. It contains a wide range of sensors for detecting the environment and a computer for data processing. The integrated sensors include two Blickfeld LiDAR sensors for 3D obstacle detection, a stereo camera for close-range detection, two additional cameras that provide the data basis for algorithm-based object detection, and a radar sensor. In addition, the system has an acoustic warning signal. The locomotive driver is equipped with a tablet in the cab that shows the track area behind the train in the live feed and indicates objects, people, signals, or other vehicles in the monitored area.
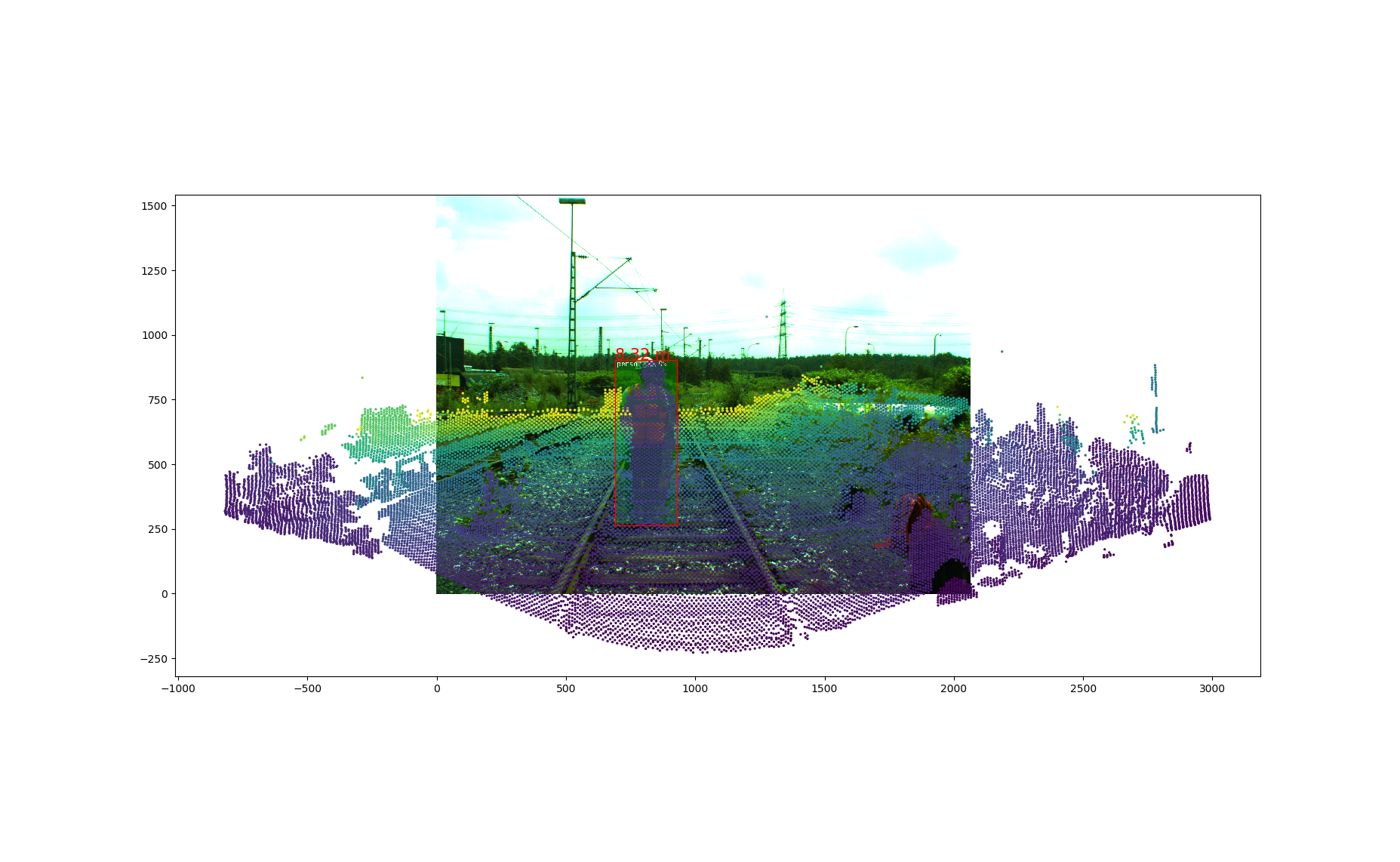
These objects are detected by fusing camera images and 3D point clouds: image recognition algorithms identify the track area and objects such as people or vehicles based on the camera image. However, they cannot determine the exact position of detected objects; only the fusion with the point cloud enables this step. This way, it can be ensured that the train’s path is clear when reversing, without a shunting assistant.
FH Aachen, responsible for the LiDAR and camera systems, decided to integrate Blickfeld sensor technology into the system for several reasons. For shunting applications, the Cube 1’s horizontal field of view of 70° is ideal for keeping an eye on the track area even when driving slight curves. The sensor technology must also be highly robust, as vibration is very high in railroad operations; the solid-state character of the Blickfeld sensors is a great advantage here. Furthermore, the high resolution of the point cloud data at a low price stands out.
You are currently viewing a placeholder content from Vimeo. To access the actual content, click the button below. Please note that doing so will share data with third-party providers.
More InformationYou are currently viewing a placeholder content from YouTube. To access the actual content, click the button below. Please note that doing so will share data with third-party providers.
More InformationYou need to load content from reCAPTCHA to submit the form. Please note that doing so will share data with third-party providers.
More InformationYou are currently viewing a placeholder content from Facebook. To access the actual content, click the button below. Please note that doing so will share data with third-party providers.
More InformationYou are currently viewing a placeholder content from Instagram. To access the actual content, click the button below. Please note that doing so will share data with third-party providers.
More InformationYou are currently viewing a placeholder content from Google Maps. To access the actual content, click the button below. Please note that doing so will share data with third-party providers.
More InformationYou are currently viewing a placeholder content from Google Maps. To access the actual content, click the button below. Please note that doing so will share data with third-party providers.
More InformationYou are currently viewing a placeholder content from Mapbox. To access the actual content, click the button below. Please note that doing so will share data with third-party providers.
More InformationYou are currently viewing a placeholder content from OpenStreetMap. To access the actual content, click the button below. Please note that doing so will share data with third-party providers.
More InformationYou are currently viewing a placeholder content from X. To access the actual content, click the button below. Please note that doing so will share data with third-party providers.
More Information