





Qb2
3D-LiDAR mit integrierter Datenverarbeitung – geeignet für intelligente Anwendungen wie Personenstromanalysen, Verkehrsüberwachung oder Automatisierung im industriellen Umfeld.

QbBasic
3D-LiDAR-Sensor zur zuverlässigen Erfassung von Punktwolken – konzipiert für OEMs und Systemintegratoren, die eigene Auswertungslogik umsetzen.

QbProtect
3D-LiDAR für Sicherheitsanwen-dungen – erkennt zuverlässig Eindringlinge durch geräteinterne Datenverarbeitung und präzise Erfassung im Außenbereich.

QbVolume
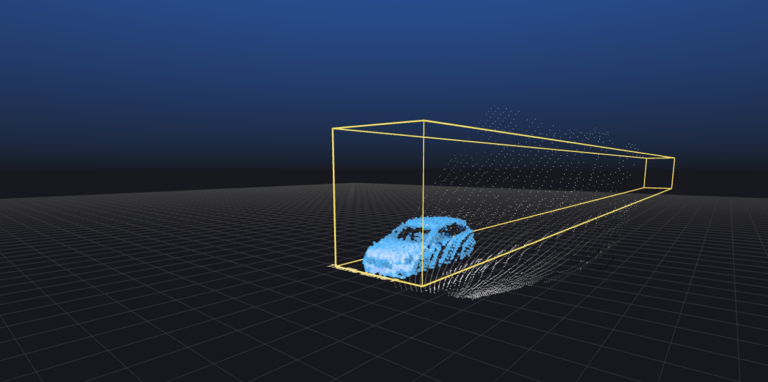
3D-LiDAR zur Volumenmessung – liefert präzise, bedarfsgerechte Daten für effizientes Bestands- und Logistikmanagement.

“Blickfeld ist nicht einfach nur ein LiDAR-Sensor, es ist eine vollständige LiDAR-Lösung”
Since becoming an official Blickfeld partner earlier this year, OQ SOLUTIONS has been bringing 3D LiDAR technology to industrial customers across South Korea. In this interview, OQ SOLUTIONS shares why they chose to partner with Blickfeld, how customers are adopting LiDAR in industrial environments, and where they see the greatest opportunities for the technology.

Partnerschaft von Blickfeld und Ayavex Solutions ermöglicht autonome 3D-Lademessung im Bergbau
ScanHaul kombiniert leistungsstarke Software für 3D-Rekonstruktion und -Analyse mit Blickfelds 3D-LiDAR-Technologie für kontinuierliche, nicht-invasive Materialüberwachung
Blickfeld präsentiert LiDAR-basiertes Verkehrsmanagement auf der Intertraffic Amsterdam 2026
Blickfeld, Spezialist für hochpräzise 3D-LiDAR-Sensorik und Perzeptionssoftware, wird auf der Intertraffic Amsterdam (10. – 13. März 2026, RAI Amsterdam) ausstellen und LiDAR-basierte Lösungen für intelligentes