The Blickfeld point cloud has several distinctive features, the most striking one being its eye shape, which is related to the sensor design and the fact that Blickfeld develops so-called “scanning LiDARs”. To understand why Blickfeld LiDAR sensors’ point cloud is elliptical, one has to take a look inside the sensor itself and at the so-called scan pattern.
Distance measurement through time-of-flight
The Blickfeld LiDAR technology is based on the time-of-flight principle: laser pulses are emitted, and based on the time it takes for them to be reflected back by an object and picked up again by the sensor, the exact distance of objects can be determined. Repeat this process millions of times per second, and you can generate a detailed image of the surroundings.
For Blickfeld’s LiDAR “Cube”, a single laser source emits the laser pulses. If the sensor consisted only of this laser source and the detector but had no beam deflection unit, one could only measure in one direction. Therefore, to obtain a holistic picture of the environment, the sensor design also includes a beam deflection unit, also known as the scanner. These components also give this special LiDAR technology its name: the scanning LiDAR. These scanners have the task of deflecting the laser beam onto the environment so that it is captured as a whole and not just at one point.
Two mirrors create the field-of-view
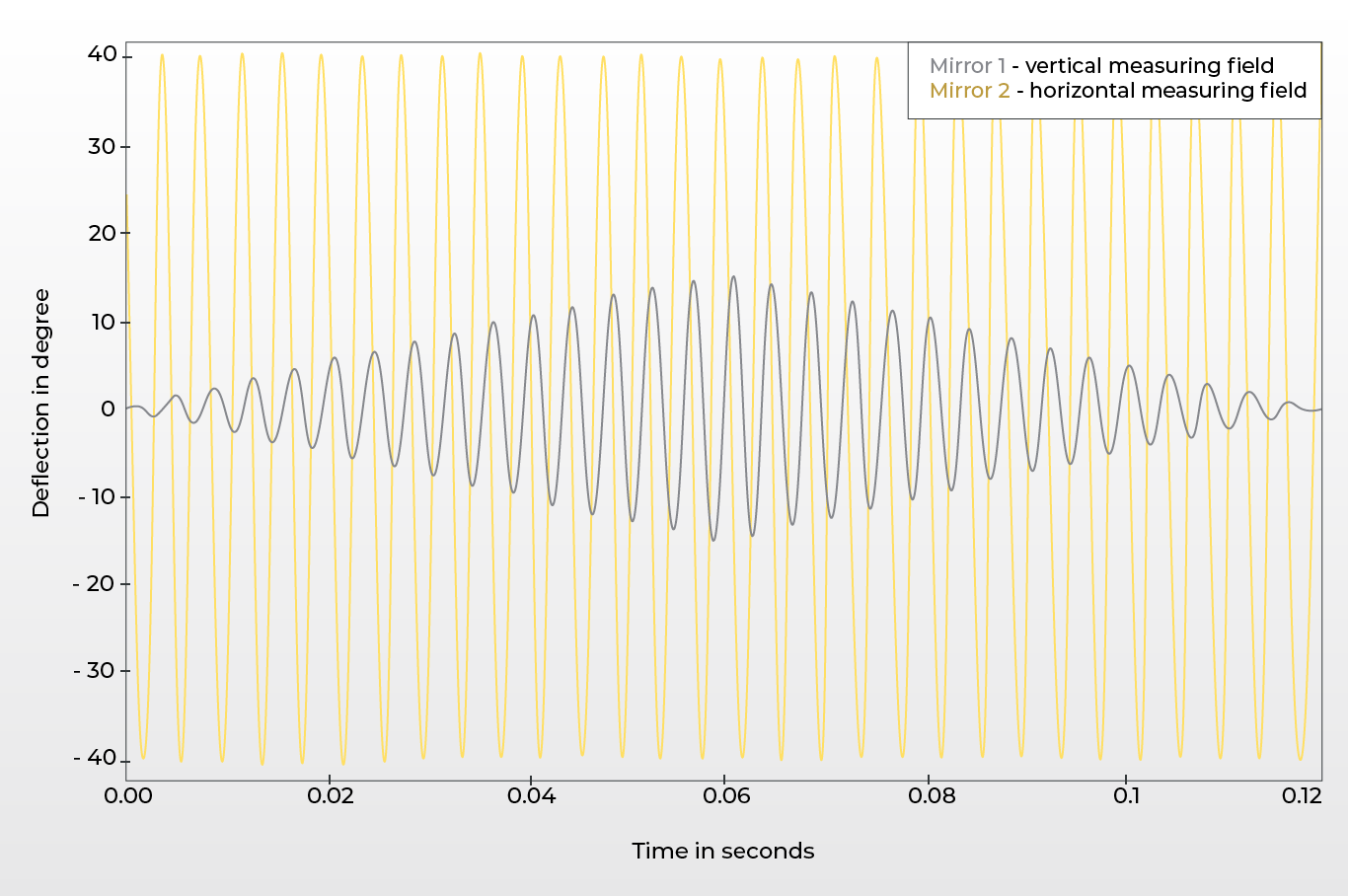
The beam deflection unit of the Blickfeld sensors consists of two microelectromechanical (MEMS) mirrors. These two mirrors are mounted so that they can oscillate freely. One of the mirrors moves horizontally, the second vertically. They are positioned in such a way that the path of the laser beam passes through both mirrors.
The horizontal mirror oscillates in a continuous and almost harmonic curve. The maximum aperture angle limits the horizontal field of view, but it can always be focused.
The vertical mirror, on the other hand, is variable in its amplitude and can change continuously. Together the oscillation amplitudes of both mirrors create the field-of-view in which the environment is scanned. Once set in motion, the mirrors oscillate at the ‘eigenfrequency’. The larger the mirrors, the lower the eigenfrequency typically is, since the mirrors increase in weight with size. In our blog post, “At the heart of the sensors – MEMS technology for LiDAR“, we have explained why we still use relatively large mirrors in our sensors.
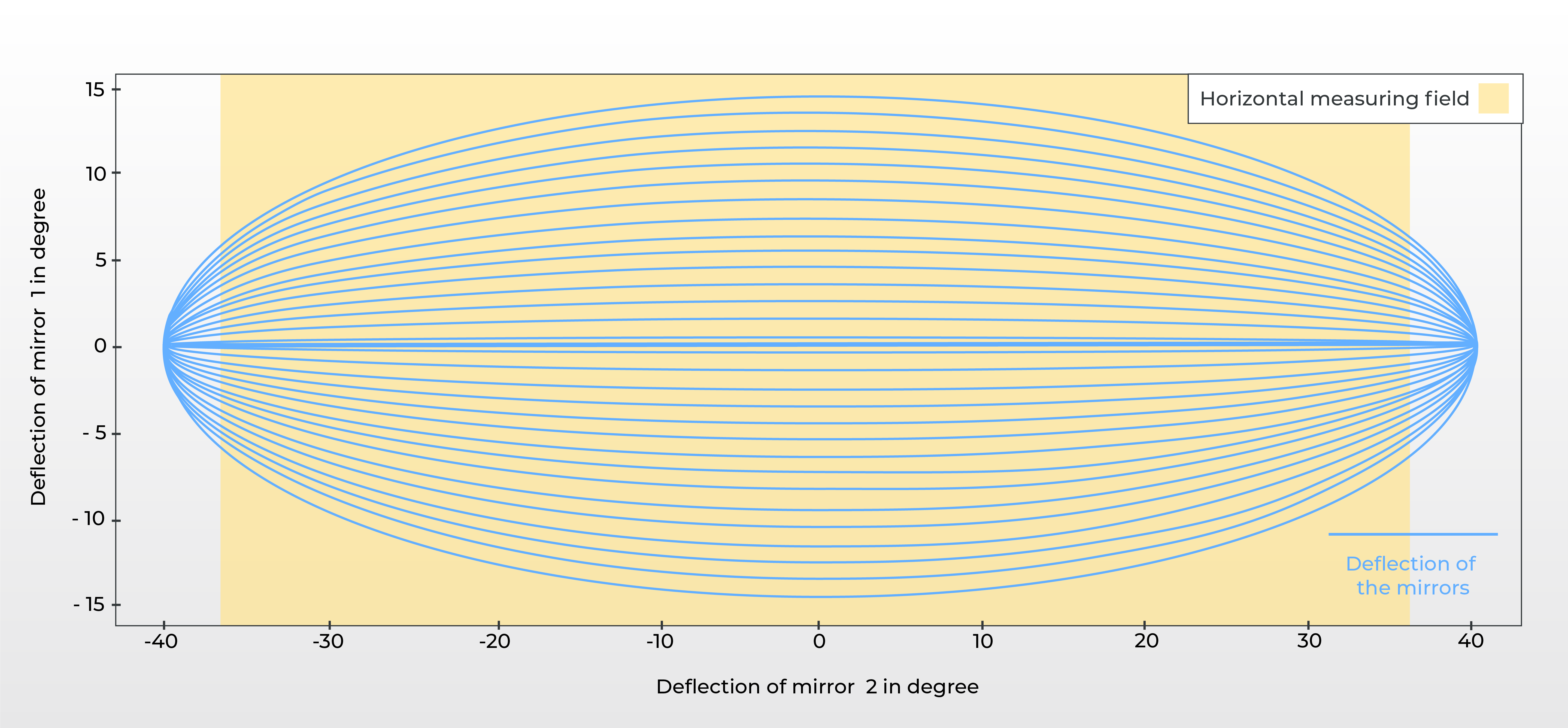
The movement of the mirrors towards each other creates the elliptical scan pattern
But why is a high eigenfrequency desirable? It determines the time needed to scan a ‘scan line’. A scan line is half of the horizontal mirror’s oscillating movement – the laser beam is thus directed in a scan line once from right to left or from left to right over the scene. The eigenfrequencies of both mirrors are tuned to each other and shifted in phase so that it scans the surroundings in an elliptical scan pattern.
This pattern is created as follows: The horizontal mirror moves from left to right, while the vertical mirror starts to oscillate with a small amplitude. Thus, the first scan line is an almost straight, horizontal line. For the second scan line, the horizontal mirror now oscillates from right to left, while the vertical mirror moves from top to bottom. Thus, the second scan line is located below the first scan line. The third line runs below the first line from left to right and so on until the maximum vertical field of view is reached. Once the scene is completely captured, the so-called frame is completed.
Configuration of the scan pattern
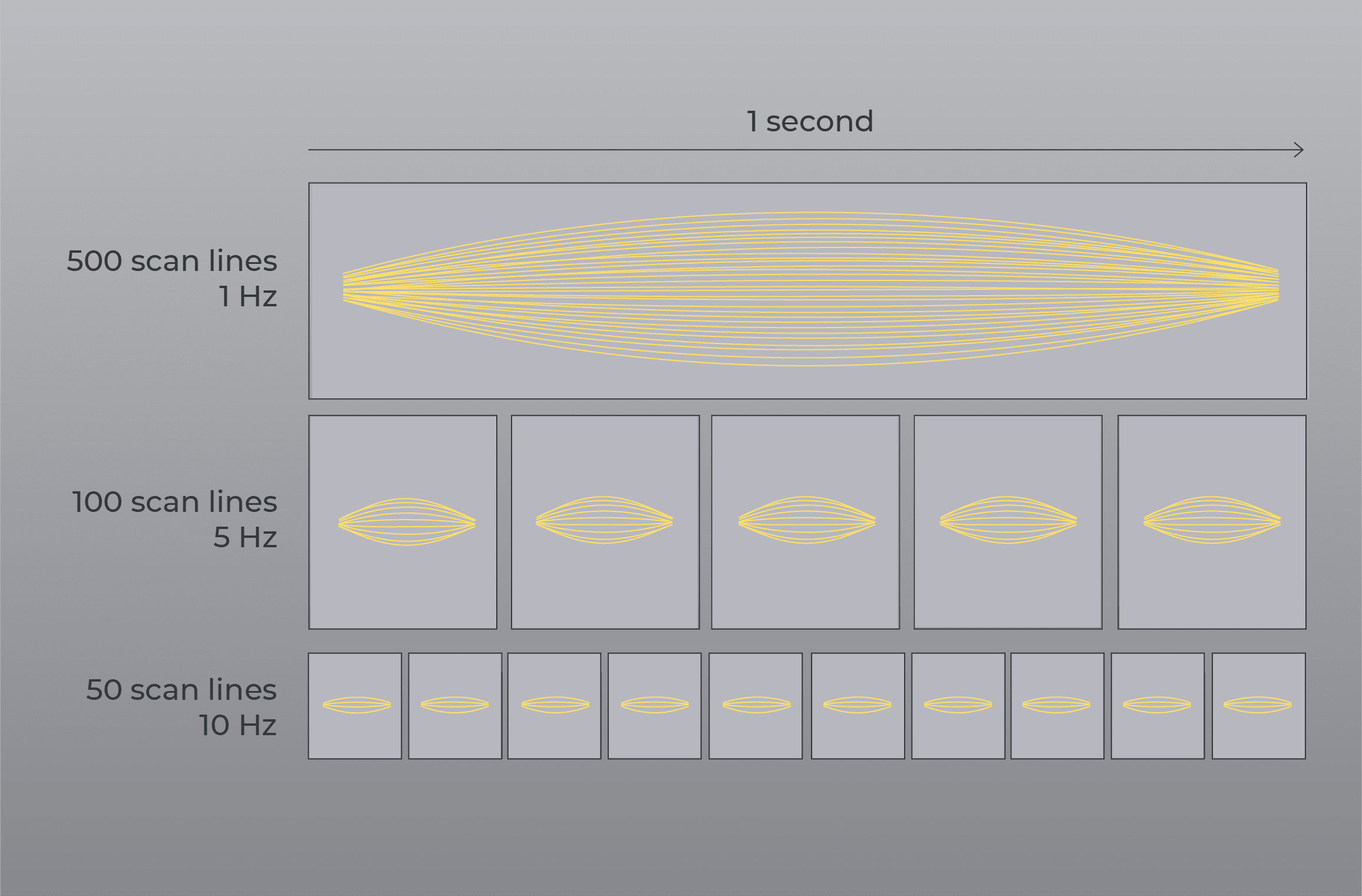
Blickfeld’s mirrors can generate a maximum of approx. 500 scan lines per second, and thanks to the variable settings, they can be used in a host of different applications and conditions. For instance, if a high number of vertical scan lines per frame is required, they can achieve the target either by keeping the distance between the lines small and a low vertical field-of-view, or by ensuring a larger distance between the scan lines and setting a larger vertical field-of-view.
However, the more scan lines created per frame, the longer it takes to scan the entire scene. With the maximum of about 500 scan lines, the field-of-view is scanned once per second. i.e. each pixel is measured once. However, a lot can change in the field of view of the sensor in one second, therefore, it makes sense for many applications to increase the frame rate. i.e. to scan the entire field of view more often per second. For this to happen, the number of scan lines per frame, and thus the resolution, must be reduced.
The horizontal resolution can also be changed. The Blickfeld LiDAR sensors work with laser pulses. That means instead of a continuous beam, short laser pulses are emitted at specific intervals. This creates the characteristic data “points” in the point cloud. If the horizontal resolution is to be increased, the duration between the laser pulses’ emission must be reduced, which increases the ‘pulse frequency’. The pulse frequency is limited by the laser diode’s excess heating and requires strict eye safety protocols. The scan pattern edges are ‘cut off’: since the scan lines converge here, the laser pulses can get very close to each other and thus get too intense. No pulses are emitted in the outermost edges of the horizontal aperture angle to protect the human eye and Blickfeld sensors only allow eye-safe scan settings.
Flexible configuration for numerous applications
The special feature of the Blickfeld LiDAR sensors is that all these settings – the flexible number of scan lines, the customizable field-of-view, and the adjustable horizontal resolution – can be tweaked in real-time in the user interface and, of course, via the API. They can be adjusted according to the current application and the corresponding requirements – and can also be changed during operation.
This allows the Blickfeld sensors to be configured individually for each application. If, for example, a very high field-of-view is required because a larger area is to be captured or a higher resolution is required to detect small objects, this can be set up without any problems. What’s more, the same sensor does not have to be configured for just one application and then used exclusively for that – the LiDAR sensors have several lives if required thanks to their flexibility.