Die Blickfeld-Punktwolke hat mehrere Besonderheiten; die auffälligste ist ihre Augenform. Auch wenn diese aus Marketingsicht sehr vorteilhaft ist – Wortspiele, die den Firmennamen und die augenförmigen Punktwolke zusammenbringen, liegen nahe – ist dies nicht der Grund für die besondere Form. Diese Eigenschaft hat vielmehr mit dem Sensor-Aufbau und damit zu tun, dass Blickfeld so genannte „Scanning LiDARs“ entwickelt. Um also zu verstehen, warum die Punktwolke von Blickfeld LiDAR-Sensoren ellipsenförmig ist, muss ein Blick in das Innere der Sensoren und das so genannte Scan-Pattern geworfen werden.
Abstandsmessung durch Time-of-Flight
Die Blickfeld LiDAR-Technologie basiert auf dem Time-of-Flight Prinzip: Laserpulse werden ausgesendet und anhand der Zeit, die sie benötigen, um von einem Objekt zurückgeworfen und vom Sensor wieder aufgefangen zu werden, lässt sich die genaue Entfernung von Objekten zum Sensor ermitteln und ein detailliertes Umgebungsbild erstellen.
Im Fall des Blickfeld-Cube LiDARs handelt es sich um eine einzige Laserquelle, die Laserpulse aussendet. Bestünde der Sensor nur aus dieser Laserquelle und dem Detektor jedoch ohne Strahlablenkungseinheit, könnte man lediglich in genau eine Richtung messen. Um stattdessen ein ganzheitliches Umgebungsbild zu erhalten, beinhaltet der Aufbau der Sensoren zudem eine Strahlablenkungseinheit, die so genannten Scanner. Diese Bauteile geben dieser speziellen LiDAR-Technologie auch ihren Namen: Der Blickfeld Cube ist ein scanning LiDAR. Die Scanner haben die Aufgabe, den Laserstrahl auf die Umgebung abzulenken, sodass diese im Ganzen und nicht nur an einer Stelle erfasst wird.
Zwei Spiegel erzeugen das Field-of-View
Die Strahlablenkungseinheit der Blickfeld-Sensoren besteht aus zwei mikroelektromechanischen (MEMS) Spiegeln. Diese beiden Spiegel sind so montiert, dass sie frei schwingen können. Einer der Spiegel bewegt sich dabei horizontal, der zweite vertikal. Dabei stehen sie so zueinander, dass der Weg des Laserstrahls über beide Spiegel führt.
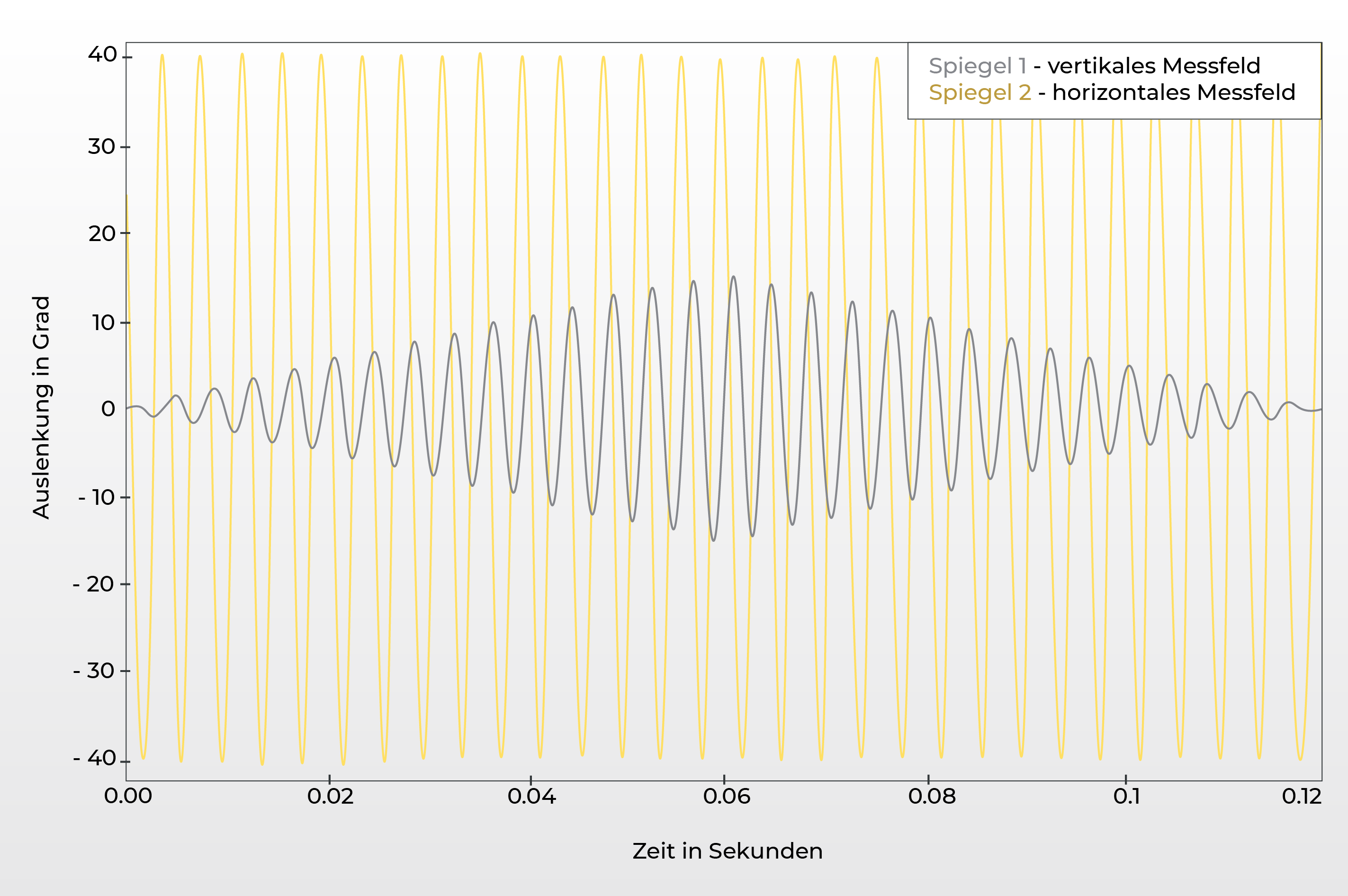
Der horizontale Spiegel schwingt in einer kontinuierlichen und annähernd harmonischen Kurve. Der maximale Öffnungswinkel limitiert dabei das horizontale Sichtfeld, verschmälern lässt es sich aber immer.
Der vertikale Spiegel hingegen ist variabel in seiner Schwingweite (Amplitude) und ändert diese kontinuierlich. Gemeinsam erzeugen die Schwingweiten beider Spiegel das Field-of-View, das Sichtfeld, in dem die Umgebung abgetastet wird. Einmal in Bewegung gesetzt, schwingen die Spiegel in einer so genannten Eigenfrequenz. Je größer die Spiegel, desto geringer die Eigenfrequenz typischerweise, da die Spiegel mit der Größe natürlich auch an Gewicht zunehmen. Warum Blickfeld trotzdem verhältnismäßig große Spiegel in seinen Sensoren verbaut, haben wir in unserem Blogpost „Im Herzen der Sensoren – MEMS-Technologie für LiDAR“ erklärt.
Die Bewegung der Spiegel zueinander erzeugt das ellipsenförmige Scan-Pattern
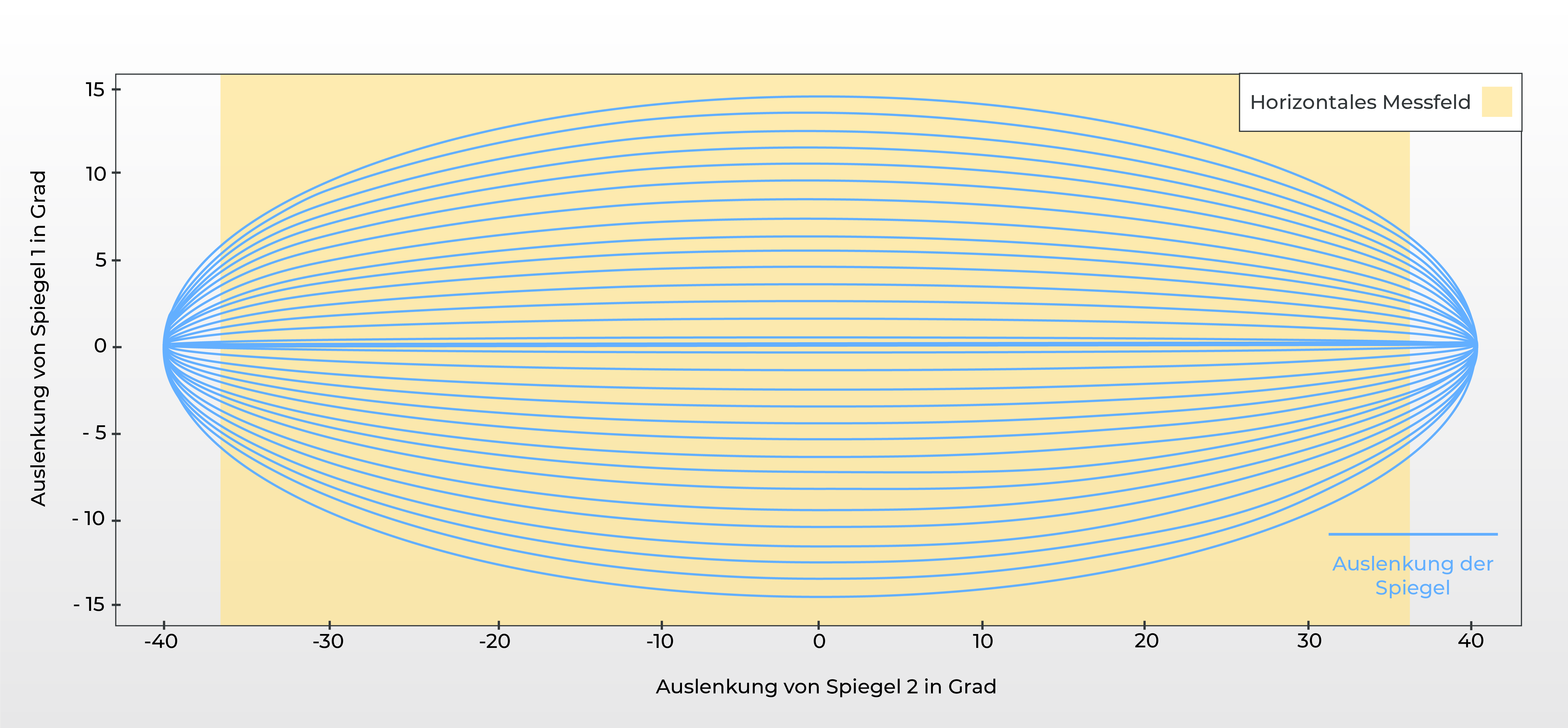
Doch warum ist eine hohe Eigenfrequenz erstrebenswert? Sie bestimmt die Zeit, die benötigt wird, um eine so genannte Scanlinie zu scannen. Eine Scanlinie ist die Hälfte einer Schwingbewegung des horizontalen Spiegels – der Laserstrahl wird also in einer Scanlinie einmal von rechts nach links oder von links nach rechts über die Szene gelenkt. Die Eigenfrequenzen beider Spiegel sind aufeinander abgestimmt und in der Phase verschoben, so dass sie die Umgebung in einem ellipsenförmigen Scan-Pattern abgetastet wird.
Dieses entsteht wie folgt: Der horizontale Spiegel bewegt sich von links nach rechts, während der vertikale Spiegel phasenversetzt beginnt mit kleiner Amplitude zu schwingen. Somit ist die erste Scanlinie eine nahezu gerade, horizontale Linie. Für die zweite Scanlinie schwingt der horizontale Spiegel nun von rechts nach links, während sich der vertikale Spiegel von oben nach unten bewegt. Dadurch ist die zweite Scanlinie unter der ersten Scanlinie angesiedelt. Die dritte Linie verläuft unterhalb der ersten Linie von links nach rechts und immer so weiter, bis das maximale vertikale Field-of-View erreicht ist. Damit ist die Szene einmal komplett aufgenommen, ein so genannter Frame ist abgeschlossen.
Konfigurierung des Scan-Patterns
Mit den Blickfeld Spiegeln lassen sich maximal ca. 500 Scanlinien pro Sekunde erzeugen. Dank der variablen Einstellungsmöglichkeiten, können diese verschieden genutzt werden: Werden viele vertikale Scanlinien pro Frame eingestellt, erwirken diese entweder eine hohe vertikale Auflösung, indem der Abstand zwischen ihnen durch ein geringes vertikales FoV gering gehalten wird, oder es wird ein größerer Abstand zwischen den Scanlinien erreicht, indem ein größeres vertikales Field-of-View eingestellt wird.
Je mehr Scanlinien pro Frame erzeugt werden, desto länger dauert es aber auch, bis die gesamte Szene abgetastet wurde. Mit den maximal erreichbaren ca. 500 Scanlinien wird das Field-of-View einmal pro Sekunde abgetastet, jeder Bildpunkt wird also einmal pro Sekunde gemessen. In einer Sekunde kann sich allerdings viel verändern im Blickfeld des Sensors. Daher macht es für viele Anwendungen Sinn, die Framerate zu erhöhen, also häufiger pro Sekunde das gesamte Sichtfeld abzutasten. Damit dies geschehen kann, muss die Anzahl der Scanlinien pro Frame, und damit die Auflösung, gesenkt werden.

Auch die horizontale Auflösung kann verändert werden. Die Blickfeld LiDAR-Sensoren arbeiten mit Laserpulsen: Es wird also nicht ein kontinuierlicher Strahl ausgesendet, sondern vielmehr kurze Laserpulse in bestimmten Abständen. Hierdurch entstehen die charakteristischen Daten-„Punkte“ in den Punktwolken. Soll die horizontale Auflösung erhöht werden, muss der Abstand zwischen dem Aussenden der Laserpulse verringert und damit die so genannte Puls-Frequenz erhöht werden.
Die Puls-Frequenz ist limitiert von den Thematiken der Abwärme der Laser-Diode und der notwendigen Einhaltung der Augensicherheit. Die Ränder des Scan-Patterns sind ‚abgeschnitten‘: Da die Scanlinien hier zusammenlaufen, wären die Laserpulse sehr nah beieinander und damit in Summe Leistungsmäßig zu intensiv. Um das menschliche Auge zu schützen, werden keine Pulse in den äußersten Kanten des horizontalen Öffnungswinkels ausgesendet. Die Blickfeld Sensoren lassen nur absolut augensichere Scaneinstellungen zu.
Flexible Konfiguration für zahlreiche Anwendungsmöglichkeiten
Das Besondere an den Blickfeld LiDAR-Sensoren ist, dass all diese Einstellungen – die flexible Anzahl an Scanlinien, das anpassbare Field-of-View, die einstellbare horizontale Auflösung – live in der Benutzeroberfläche und natürlich über die API vorgenommen werden können. Sie können also je nach aktueller Anwendung und den entsprechenden Anforderungen angepasst werden – und auch im Betrieb umgestellt werden.
So lassen sich die Blickfeld-Sensoren für jede Anwendung individuell konfigurieren. Wird etwa ein besonders hohes Sichtfeld benötigt, weil ein größerer Bereich erfasst werden soll oder eine hohe Auflösung gefordert, damit auch die kleinsten Objekte erkannt werden, so lässt sich dies problemlos einrichten. Vielmehr noch: Der gleiche Sensor muss nicht nur für eine Anwendung konfiguriert und dann ausschließlich für diese eingesetzt werden – die LiDAR-Sensoren haben bei Bedarf mehrere Leben aufgrund ihrer flexiblen Einsetzbarkeit.