LiDAR ist eine entscheidende Technologie für eine Vielzahl von hochmodernen Anwendungen. Doch bei der Fülle der angebotenen Produkte ist es manchmal schwierig, den richtigen Sensor für eine bestimmte Anwendung zu finden. Wie unterscheidet man zwischen all den verschiedenen Typen und Modellen, die es gibt? Welches sind die wichtigsten Parameter und Spezifikationen, die zur Bewertung von LiDAR-Sensoren und ihrer Leistung herangezogen werden können? In diesem Blogbeitrag werden wir die bestimmenden Parameter für LiDAR-Sensoren entmystifizieren und einige Beispiele für die möglichen Anwendungen der Technologie darstellen.
LiDAR-Parameter
- Reichweite
- Field of View (FoV)
- Scanmuster
- Unempfindlichkeit gegenüber anderen Laserquellen
- Detektionsrate
- Multiple Returns
- Entfernungspräzision und Messgenauigkeit
Reichweite
Die Reichweite eines LiDARs ist wahrscheinlich der bekannteste Parameter, mit dem die Sensoren bewertet werden. Er bezieht sich auf den am weitesten entfernten Punkt, an dem ein Objekt noch erfasst werden kann. Dieser hängt zu großen Teilen von der Leistung der Laserquelle ab; je höher die Leistung, desto weiter kann der Sensor „sehen“. Die maximal zulässige Laserleistung ist durch Bestimmungen zur Augensicherheit begrenzt. Andere Faktoren, die die Reichweite bestimmen, sind weitere Eigenschaften des LiDAR wie Lasertyp und Blendengröße. Aber auch die Eigenschaften des reflektierenden Objekts, z.B. Größe, Entfernung, Reflektivität und Diffusion oder Spiegelreflexion haben Einfluss auf die Reichweite, ebenso wie äußere Einflüsse wie Wetter und Temperatur.
Ein Beispiel, bei dem eine hohe Reichweite wichtig ist, ist ein Einbruchmeldesystem. Ein LiDAR kann zur Überwachung eines Grundstücks verwendet werden, wobei er so installiert wird, dass er entlang einer Wand oder eines Zauns „blickt“. So wird jedes Objekt erkannt, das in einen vorher definierten Bereich eindringt. Die Software ermöglicht zudem eine Objektklassifizierung, so dass ein Alarm nur dann ausgelöst wird, wenn bestimmte Kriterien erfüllt sind. Hierfür wird eine hohe Reichweite benötigt: Ist der zu betrachtende Bereich besonders lang und die Reichweite des Sensors allerdings begrenzt, werden zahlreiche Sensoren benötigt, um die gesamte Fläche im Blick zu haben. Die Rechnung ist hier ganz einfach: Je höher die Reichweite der Sensoren, desto weniger Geräte werden benötigt, und umso einfacher und rentabler ist die Integration.
Die Produktfamilie von Blickfeld hat eine große Reichweite für MEMS-basierte LiDAR-Sensoren. Das liegt an dem proprietären Design des Spiegels, der einen Durchmesser von mehr als 10 Millimetern und damit eine große Apertur aufweist. Dadurch kann ein hoher Anteil der reflektierten Photonen auf den Photodetektor gelenkt werden, so dass die Sensoren auch schwach reflektierende Objekte in großer Entfernung zuverlässig erfassen können.
Die Reichweite eines LiDARs beschreibt die Distanz bis zum am weitesten entfernten Punkt, an dem der Sensor noch ein Objekt erfasst.
Die Faktoren, die die Reichweite bestimmen, lassen sich grob in drei verschiedene Kategorien einteilen:
– Eigenschaften des LiDAR (z.B. Lasertyp, Leistung der Laserquelle, Blendengröße)
– Äußere Einflüsse (z.B. Regen, Nebel, Schnee, Sonnenlicht)
– Eigenschaften des Objekts (z.B. Größe, Abstand, Reflektivität, diffuse oder spiegelnde Reflexion)
Field of View (FoV)
Das Field of View, oder Sichtfeld, ist der Bereich, den der LiDAR-Sensor abdeckt. Es variiert je nach LiDAR-Technologie erheblich. Spinning-LiDAR-Sensoren zum Beispiel erzeugen ihr Sichtfeld durch die mechanische Drehung von in der Regel 16 bis 32 gestapelten Laserquellen, so dass eine 360-Grad-Ansicht erzeugt wird. Die weniger komplexen und daher kostengünstigeren, aber robusteren Solid-State Scanning-LiDAR-Sensoren verwenden weniger Laser, im Fall von Blickfeld nur einen, die jeweils nur einen Punkt treffen. Um das Field of View Punkt für Punkt zu beleuchten, wird der Strahl abgelenkt und damit die Umgebung „gescannt“.
Die Blickfeld LiDAR-Sensoren verfügen über eine große Flexibilität bei der Konfiguration des Sichtfeldes. Unter der Annahme, dass die Menge der pro Abtastzyklus emittierten Lasersignale immer gleich ist, führt eine Verringerung des Winkels und damit des vertikalen FoV zu einer dichteren Punktwolke, während eine Vergrößerung des vertikalen FoV die Punkte weiter auseinanderspreizt. Im horizontalen FoV kann der Punktabstand bei gleichbleibendem FoV angepasst werden.
Das Field of View ist der Bereich, der von LiDAR-Signalen abgetastet wird.
Es variiert je nach LiDAR-Technologie erheblich. Die FoV-Anforderungen ändern sich entsprechend der Anwendungen sowie vielen anderen Faktoren, wie z.B. der Art der abzutastenden Objekte oder deren Oberflächeneigenschaften.
Die FoV-Anforderungen variieren je nach den Anforderungen der Anwendung sowie vielen anderen Faktoren, wie z.B. der Art der zu scannenden Objekte oder deren Oberflächeneigenschaften. Werden beispielsweise große Materialhaufen in einer Lagerhalle zur Volumenbestimmung angeschaut, ist ein größeres Sichtfeld von Vorteil, um möglichst viel Fläche abzudecken. Wird hingegen entlang einer Grundstücksgrenze mit Hilfe von LiDAR ein virtueller Zaun auf einem schmalen Streifen gezogen, reicht ein enges Sichtfeld aus. Zudem ist hier eine dichtere Punktwolke hilfreich, um jegliche eintretende Objekte noch zuverlässiger zu erkennen und zu klassifizieren.
Scanmuster
Wenn von Scanning LiDAR-Sensoren gesprochen wird, muss ein weiterer wichtiger Parameter berücksichtigt werden: Das Scanmuster. Scanning-LiDAR-Sensoren verfügen über Strahlablenkungseinheiten, die den Laserstrahl in verschiedene Richtungen ablenken, um ihre Umgebung zu erfassen. Dadurch entstehen einzigartige Muster in der Punktwolke. Diese Muster haben unterschiedliche Eigenschaften wie die Anzahl der Scanlinien oder die Punktdichte. Je nach Anwendung, in der der LiDAR eingesetzt wird, können die verschiedene Merkmale des Scanmusters wichtig sein. Beispielsweise bei Security-Anwendungen ist eine hochauflösende Punktwolke häufig wichtig, um Eindringlinge präzise zu erkennen und zwischen harmlosen Objekten und tatsächlichen Bedrohungen zu unterscheiden. Um die benötigte Auflösung zu erreichen, ist eine hohe Anzahl von Scanlinien erforderlich.
Das Besondere an den Blickfeld-Sensoren ist, dass die Scanlinien, aus denen das Scanmuster besteht, jederzeit mit wenigen Klicks angepasst werden kann – und das auch während der Verwendung des Sensors. Der LiDAR kann so je nach Anwendung und deren unterschiedlichen Anforderungen konfiguriert werden, z.B. kann durch das Anpassen der Scanliniendichte nahtlos von einem gröber aufgelösten Gesamtüberblick auf eine hohe Auflösung in einem besonders interessanten Bereich umgeschaltet werden.
Scanning LiDAR-Sensoren lenken den Laserstrahl in verschiedene Richtungen über die Szene ab, um ihre Umgebung zu erfassen. Dadurch entstehen einzigartige Muster in der Punktwolke, die als Scanmuster bezeichnet werden. Diese Muster weisen verschiedene Eigenschaften auf, die unterschiedliche Anwendungen ermöglichen.
Unempfindlichkeit gegenüber anderen Laserquellen
Bei vielen Echtzeitanwendungen, bei denen mehrere LiDAR-Sensoren gleichzeitig zum Einsatz kommen, ist es von entscheidender Bedeutung, dass die Sensoren sich nicht gegenseitig blenden. Nimmt beispielsweise der LiDAR-Sensor eines autonomen Fahrzeugs Lasersignale des LiDAR-Sensors eines entgegenkommenden Fahrzeugs auf, entsteht ein falsches Abbild der Umwelt. Folglich könnte z.B. ein Hindernis auf der Straße falsch erkannt werden, was zu unnötigen und potenziell gefährlichen Notbremsungen führen könnte. Wenn das parasitäre Echo stark genug ist, könnte es den LiDAR so weit ablenken, dass ein Objekt übersehen oder nicht erkannt wird, was ein noch größeres Sicherheitsrisiko darstellt. Auch Sonnenlicht birgt eine große Herausforderung, da es Rauschen erzeugt und die Zuverlässigkeit der Daten sowie die Reichweite verringert. Es gibt verschiedene Methoden, die sicherstellen, dass diese Herausforderungen die LiDAR-Sensoren nicht beeinträchtigen. Blickfeld hat gleich zwei davon angewandt, um die hohe Qualität ihrer LiDAR-Daten zu erreichen:
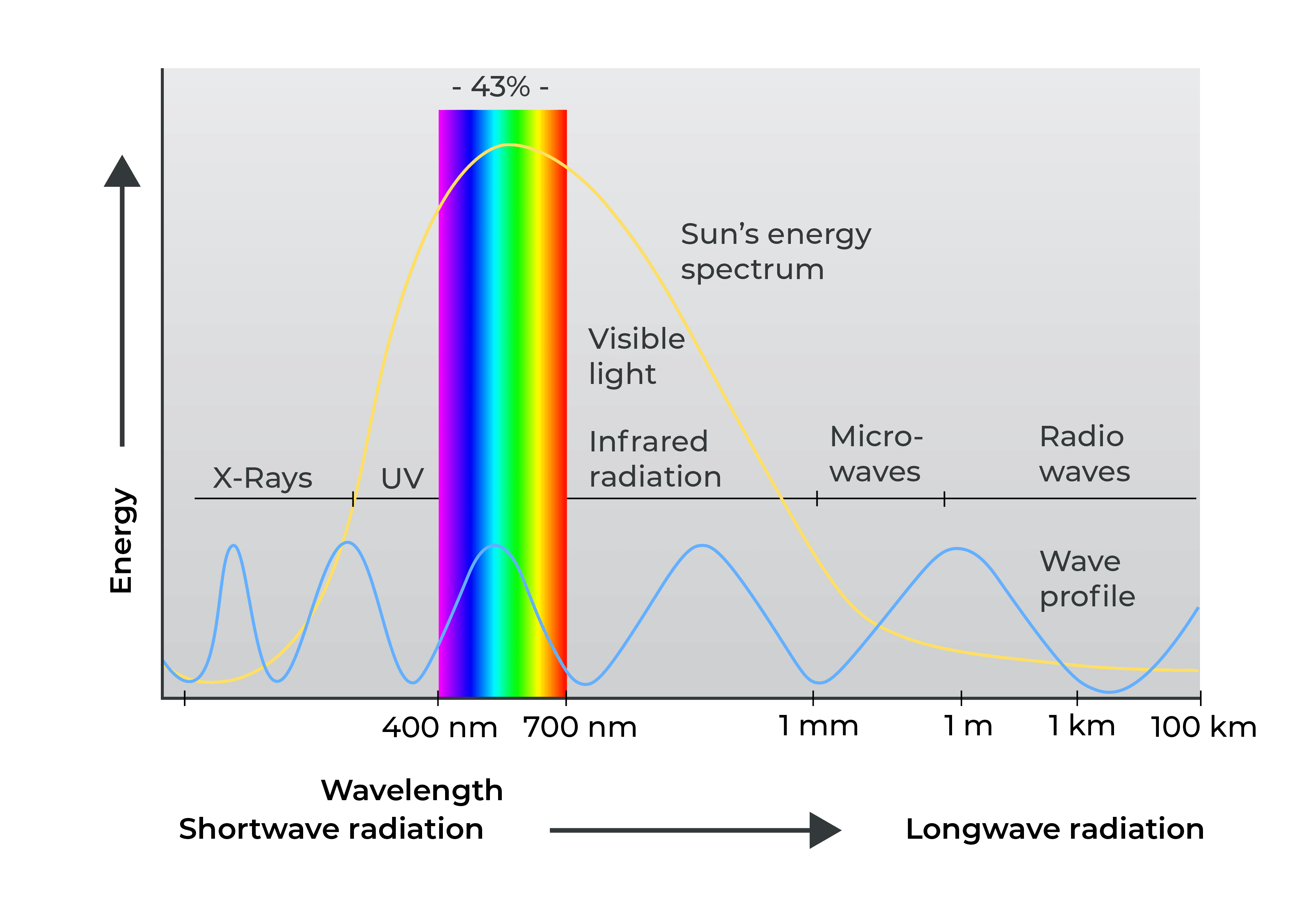
Spektrale Filterung
Die Blickfeld-Produktfamilie arbeitet mit einer Wellenlänge von 905 nm, nahe dem Infrarotbereich des elektromagnetischen Spektrums. Er verfügt über einen Filter vor dem Detektor, der nur elektromagnetische Wellen mit einer ähnlichen Wellenlänge durchlässt und andere blockiert. Daher reagiert der Cube nicht auf die Laser von anderen LiDARs, die bei anderen Wellenlängen, z.B. 1550 nm, arbeiten. Der Detektor ist jedoch immer noch anfällig dafür, von Signalen eines anderen Lasers, der mit 905 nm arbeitet, überlistet zu werden. Um dem entgegenzuwirken, wird eine Technik namens räumlicher Filterung eingesetzt.
Räumliche Filterung
Das koaxiale Design des Blickfeld LiDARs ermöglicht es, den zurückgeworfenen Laserpuls über den gleichen Weg durch die Strahlablenkungseinheit zu empfangen, den der Laserpuls beim Aussenden genommen hat. Dadurch wird sichergestellt, dass der Detektor nur die Photonen einfängt, die aus genau der Richtung zurückgeworfen werden, in die ausgesandt wurde, und für alle anderen, die nicht auf genau dieser Achse eintreffen, „blind“ ist.
Im Wesentlichen müsste ein anderer LiDAR-Sensor einen Laserpuls im genau gleichen Winkel, aber in entgegengesetzter Richtung und im exakt richtigen Zeitfenster senden, damit der Cube ein Störecho erkennt und erzeugt. Die Wahrscheinlichkeit dafür hängt von einer Reihe von Faktoren ab, wie dem Abstand zwischen den LiDARs, den Abtastraten, der Strahldivergenz und der relativen Ausrichtung, was das Eintreten höchst unwahrscheinlich macht.
Spektrale und räumliche Filterung tragen beispielsweise auch dazu bei, das durch das Sonnenlicht erzeugte Rauschen zu reduzieren und die Auswirkungen auf die Reichweite zu minimieren. Der Erfassungsbereich des Cubes wird bei einem Basiswert von 100 klux Hintergrundbeleuchtung gemessen.
Senden mehrere Sensoren Signale aus, kann der LiDAR diese empfangen und die Daten dadurch verfälscht werden. Dieser Effekt kann durch Maßnahmen wie spektrale und räumliche Filterung minimiert werden.
Detektionsrate
Die Detektionsrate (DR) oder True Positive Rate (TPR) ist der Anteil der Bilder, in denen ein ausgewählter Punkt auf einem realen Ziel erkannt wird. Im Gegensatz dazu misst die Falsch-Positiv-Rate (FPR) den Anteil der Frames, in denen ein Echo in der Punktwolke erkannt wird, obwohl kein reales physikalisches Ziel vorhanden ist.
Falsch-Erkennungen sind unerwünscht, da sie die Genauigkeit der Punktwolke verringern und damit die Zuverlässigkeit der Objekterkennung vermindern. In unserem Beispiel des Einbruchmeldesystems (siehe oben) führt eine schlechte Erkennungsrate des LiDAR zu einer erhöhten Anzahl von Falschalarmen in Überwachungsanwendungen, was die Ergebnisse unzuverlässig macht.
Die Detektionsrate (DR) oder True Positive Rate (TPR) ist der Anteil der Bilder, in denen ein ausgewählter Punkt auf einem realen Ziel erkannt wird. Falsche Erkennungen sind unerwünscht, da sie die Genauigkeit der Punktwolke reduzieren und damit die Zuverlässigkeit der Objekterkennung vermindern.
Multiple Return
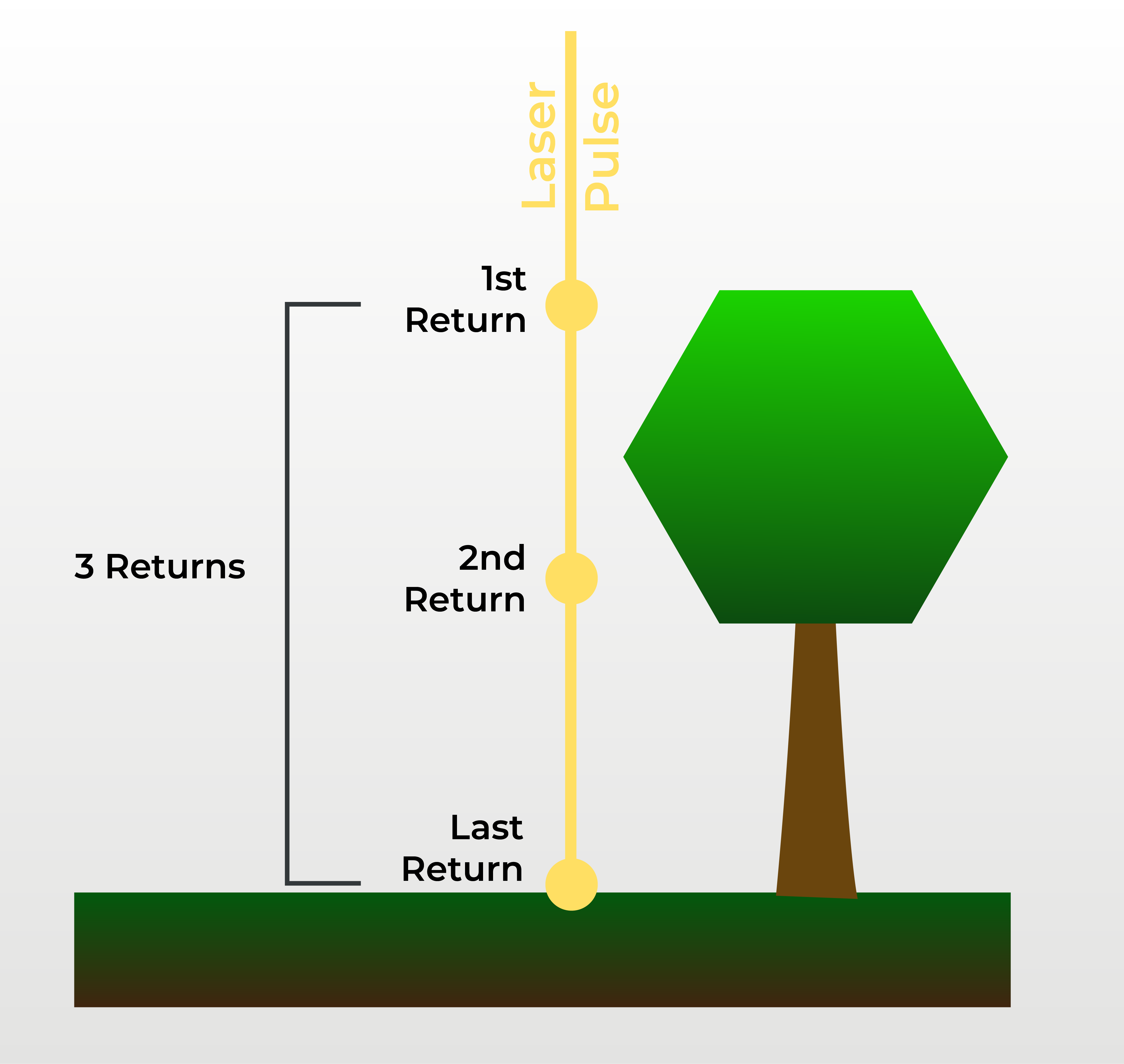
LiDAR-Sensoren empfangen normalerweise mehr als eine Reflexion nach dem Aussenden des Laserstrahls, da dieser sich über eine zunehmende Entfernung weitet, bzw. divergiert. Während also ein Teil des Strahls auf das nächstgelegene Ziel trifft, kann ein weiterer Teil des gleichen Strahls auf ein Ziel in größerer Entfernung treffen. Das bedeutet, dass die reflektierten Laserpulse zu verschiedenen Zeitpunkten zurückkehren und somit mehrere Returns oder Rückläufe registriert werden.
Kann der LiDAR nur einen einzigen Rücklauf analysieren, wird auch nur ein Objekt angezeigt, während mögliche dahinter liegende Objekte unerkannt bleiben. LiDAR-Sensoren, die mehrere Returns verarbeiten können, können auch Informationen über Objekte erfassen, die teilweise durch andere Objekte verdeckt sind. Dies erhöht die Menge und Detailtiefe der Daten, die mit der gleichen Anzahl von ausgesendeten Laserpulsen erfasst werden.
Ein Beispiel, in dem Multiple Returns wichtig sind, ist die Erfassung von einem Wald von oben. Hierbei ist der erste Return der von den Baumkronen reflektierte Strahl, ein weiterer Teil des gleichen Strahls könnte auf einige Äste auf dem Weg treffen und reflektiert werden, und ein anderer Teil des Laserstrahls könnte auf den Boden treffen und von dort reflektiert werden. Somit würde der LiDAR drei verschiedene Entfernungen registrieren, wenn er in der Lage ist, Multiple Returns zu detektieren.
Der Blickfeld Qb-Familie unterstützt bis zu drei mögliche Returns von jedem ausgesendeten Laserpuls und bietet die Möglichkeit, die Anzahl der Returns auszuwählen. Damit sind die Sensoren für eine Vielzahl von Anwendungsfällen konfigurierbar.
Ein vom LiDAR ausgesendeter Laserstrahl wird in der Regel mit zunehmender Entfernung breiter oder divergiert und kann somit auf mehr als ein Objekt treffen. Dadurch erzeugt ein einzelner ausgesendeter Laserpuls mehrere Returns. LiDAR-Sensoren, die mehrere Returns registrieren können, erkennen auch teilweise blockierte Objekte, was die Menge und Detailtiefe der gesammelten Daten erhöht.
Entfernungspräzision und Messgenauigkeit
Präzision und Messgenauigkeit sind Schlüsselparameter von LiDAR-Sensoren. Die Unterscheidung zwischen ihnen ist wichtig, da sie oft miteinander verwechselt werden.
Präzision
Die Präzision ist ein Maß für die Wiederholbarkeit von LiDAR-Messungen. Hohe Präzision bedeutet, dass wiederholte Messungen desselben Ziels sehr nahe am Mittelwert liegen, und niedrige Präzision wird dementsprechend durch eine große Streuung der Werte um den Mittelwert angezeigt.
Die Entfernungspräzision ist entscheidend für Anwendungen wie z.B. Geschwindigkeitskamera-Messungen, bei denen die Fahrzeuggeschwindigkeit anhand der Entfernung zwischen dem LiDAR und dem sich bewegenden Objekt innerhalb eines kurzen Zeitintervalls berechnet werden muss.
Die Entfernungspräzision hängt von der Distanz zwischen Sensor und Objekt sowie den Objekteigenschaften, wie Reflektivität und Einfallwinkel, ab.
Die Präzision ist ein Maß für die Wiederholbarkeit von LiDAR-Messungen. Hohe Präzision bedeutet, dass wiederholte Messungen nahe am Mittelwert liegen.
Messgenauigkeit
Die Genauigkeit definiert, wie nahe eine Messung am tatsächlichen Wert liegt, d.h. wie nahe der gemessene Abstand zum Objekt am tatsächlichen Abstand liegt. Für einen LiDAR mit hoher Messgenauigkeit sollten die erfassten Abstandswerte sehr nahe am tatsächlichen Abstand und innerhalb der festgelegten Bereichsgenauigkeit liegen.
Eine hohe Messgenauigkeit ist in Anwendungen nützlich, die Messungen absoluter Entfernungen beinhalten, etwa für Volumenmessungen. Auch bei Einsatz in Drohnen zur Kartierung von Arealen, ist eine hohe Genauigkeit für die Identifizierung der darunter liegenden Topographie entscheidend. Diese Daten können weiterverarbeitet werden, um 3D-Modelle von Nutzpflanzen zu erstellen und Trockenheit oder verschiedene Wachstumsstadien zu überwachen, um den Wasserverbrauch zu optimieren.
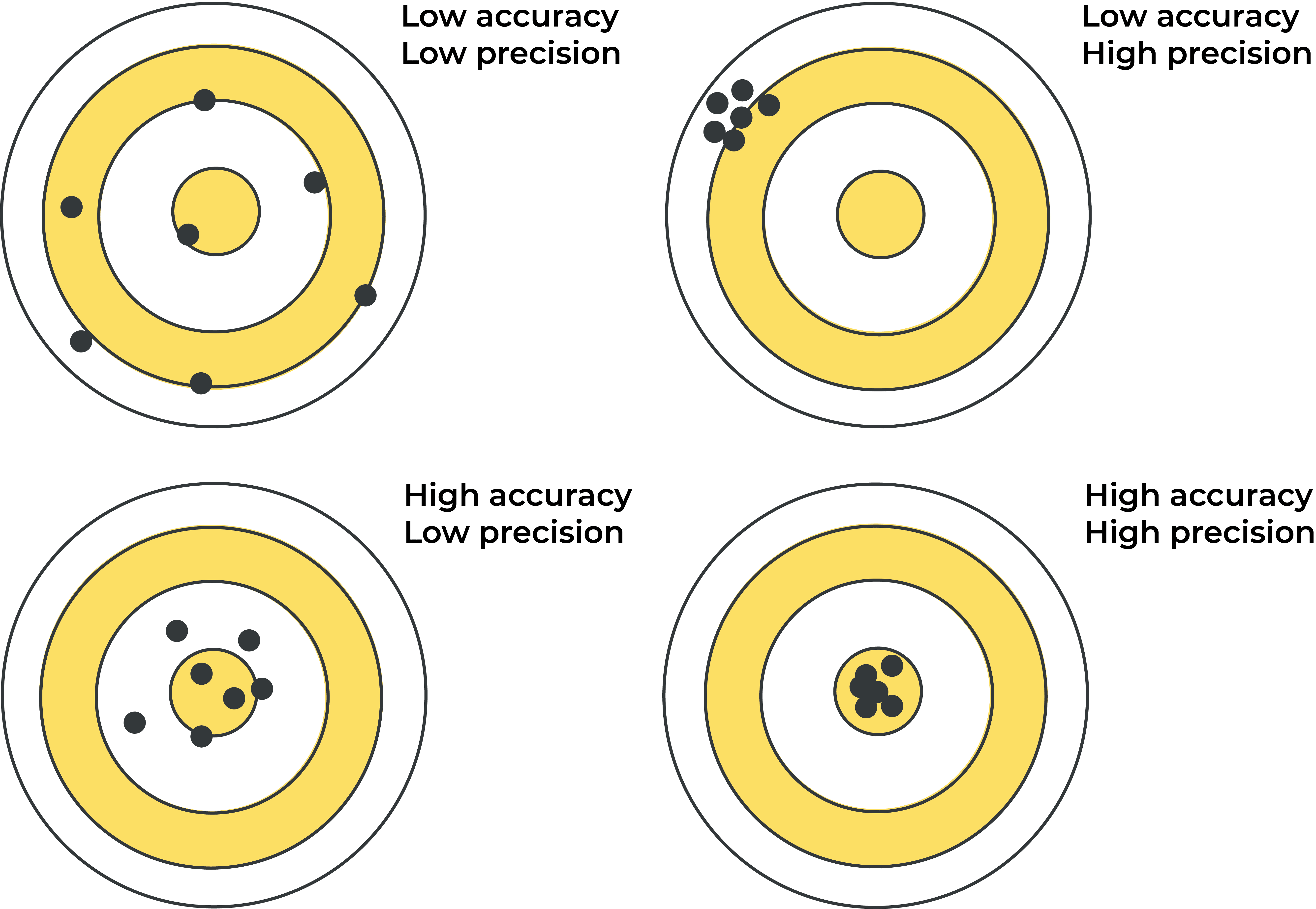
Die Messgenauigkeit definiert, wie nahe eine Messung am tatsächlichen Wert liegt. Ein LiDAR mit hoher Messgenauigkeit erhebt Daten, die dem tatsächlich Abstand zum Objekt sehr nahe kommen.
LiDAR-Sensoren stehen an der Spitze der technologischen Revolution und ermöglichen eine Vielzahl von Anwendungen. Es gibt sie in allen Formen und Größen – und auf der Basis unterschiedlicher Technologien. Das Verständnis der unterschiedlichen Spezifikationen ist daher entscheidend für die Auswahl des geeigneten Sensors für eine bestimmte Anwendung.