
Ob Scanning-, Spinning- oder Flash-Technologie – alle LiDAR-Sensoren haben eins gemeinsam: Sie erfassen ihre Umwelt mit Hilfe von Licht. An diesem Punkt hören die Gemeinsamkeiten aber schon auf. Denn selbst das Prinzip, nach dem, anhand von reflektiertem Licht, Abstände gemessen werden, ist nicht bei allen Technologien gleich. Die zwei bekanntesten Prinzipien sind die Laufzeitmessung (Time-of-Flight = ToF) und die kontinuierliche Frequenzmodulation (Frequency Modulated Continuous Wave = FMCW).
Time-of-Flight: Abstandsmessung mit Hilfe von Laserpulsen
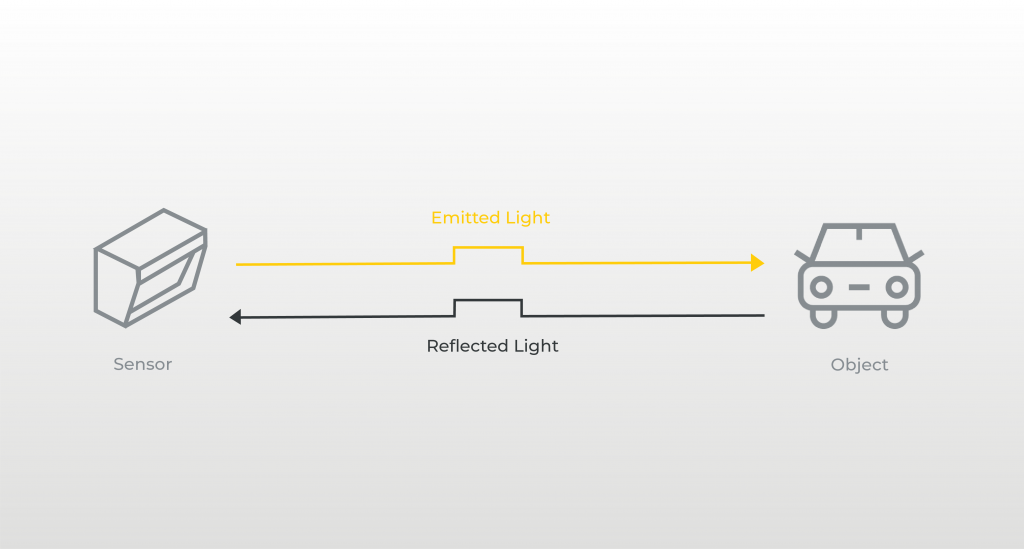
ToF ist das am weitesten verbreitete Messprinzip bei LiDAR-Systemen, da es durch eine hohe Zuverlässigkeit der Daten und eine kosteneffiziente Umsetzung mit günstigen Laserquellen überzeugt. Die Funktionsweise basiert darauf, Laserpulse auszusenden und die Zeit zu messen, bis das Licht vom Objekt reflektiert und wieder vom Sensor aufgenommen wird.
Vorteile von ToF:
- Kosteneffizienz: Die Methode kann mit preiswerten Laserquellen umgesetzt werden.
- Zuverlässigkeit: ToF liefert konsistente und präzise Ergebnisse in verschiedensten Anwendungen.
Es gibt jedoch auch Einschränkungen: Um die Reichweite zu maximieren, wird das Laserlicht stark gebündelt, was jedoch durch die Vorgaben zur Augensicherheit begrenzt ist. Diese Herausforderung kann durch intelligente Sensor-Designs überwunden werden. Zum Beispiel ermöglichen große MEMS-Spiegel, wie sie in Blickfeld Sensoren verwendet werden, hohe Reichweiten, ohne die Sicherheit zu gefährden.
Alternative zu Pulsen: Die Frequenzmodulation
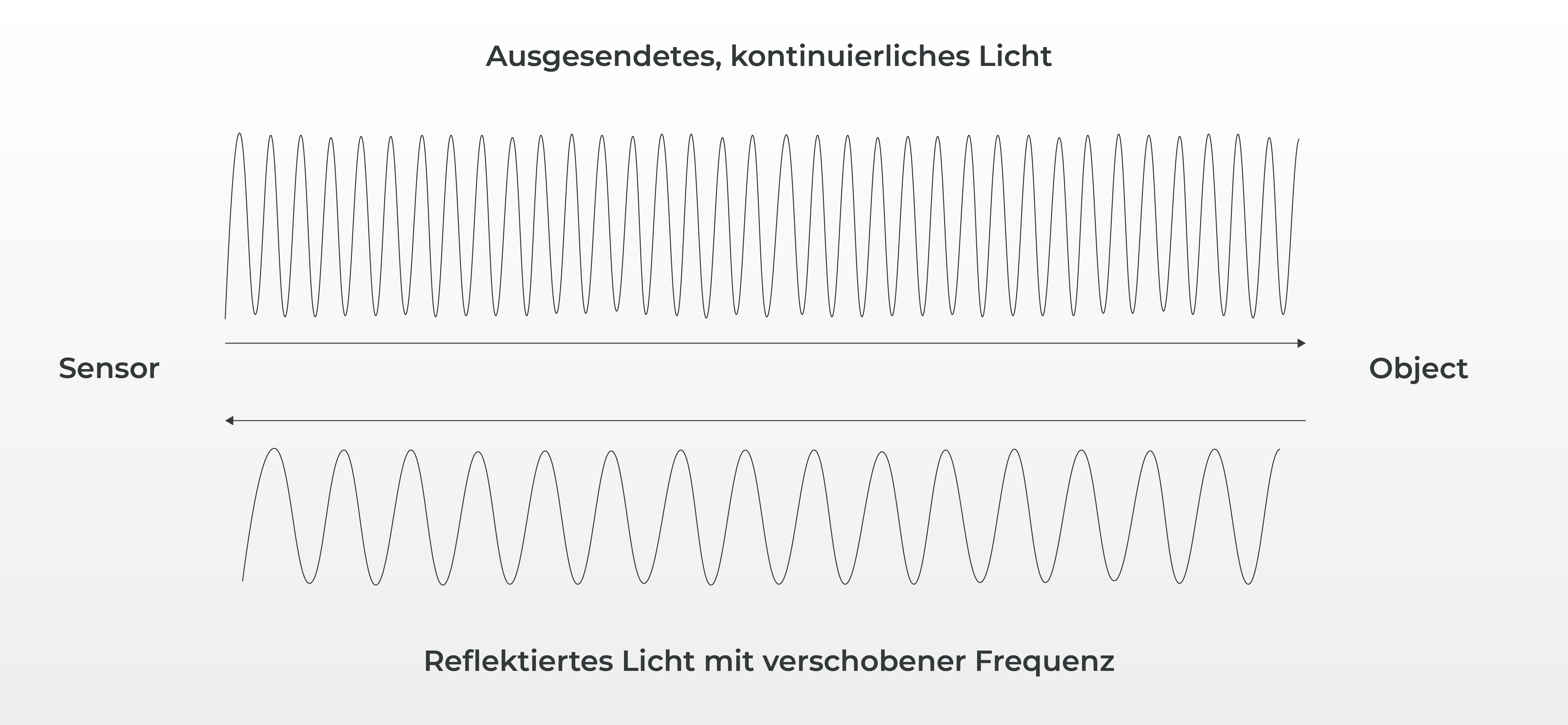
Eine Alternative zu Pulsen ist die Frequenzmodulation, bei der ein kontinuierlicher Laserstrahl ausgesendet wird. Dieser wird regelmäßig moduliert, wobei die Frequenz des Signals zyklisch geändert wird. Trifft der modulierte Laserstrahl auf ein Objekt und wird reflektiert, ergibt sich eine Frequenzverschiebung, die proportional zur Distanz des Objekts ist.
Hauptvorteil: Mit der FMCW-Methode lässt sich durch den Doppler-Effekt direkt die Geschwindigkeit von Objekten messen, was eine präzise Geschwindigkeitsbestimmung ermöglicht, ohne zusätzliche Berechnungen wie bei ToF.
Direkte Geschwindigkeitserfassung für das autonome Fahren
ToF kann die Geschwindigkeit von Objekten ebenfalls messen, allerdings nur indirekt. Dazu wird die Distanz mehrfach gemessen, und die Geschwindigkeit wird aus der Veränderung des Abstands über die Zeit berechnet. FMCW hingegen liefert die Geschwindigkeit direkt, da die Frequenzverschiebung des reflektierten Lichts durch den Doppler-Effekt sofort Informationen zur Bewegung des Objekts gibt.
Kohärenter Detektor vs. Koaxialer Sensoraufbau
Beide Prinzipien verfügen über Mechanismen, um eine hohe Signalqualität zu gewährleisten:
- FMCW: Kohärente Detektoren in FMCW-Systemen filtern ausschließlich das ausgesendete, kohärente Licht. Dadurch wird das Signal-Rausch-Verhältnis verbessert, und schwach reflektierende Objekte können in größeren Entfernungen erkannt werden.
- ToF: Koaxiale Designs sorgen dafür, dass nur Licht aufgefangen wird, das in genau dem gleichen Winkel zurückkommt, in dem es ausgesendet wurde. Dies filtert Störsignale wie Sonnenlicht oder Fremdsignale von anderen LiDAR-Sensoren effektiv heraus.
Entwicklungsstand und Markttauglichkeit
Ein wesentlicher Vorteil von ToF ist seine Entwicklungsreife. Diese Methode wird seit Jahren erfolgreich in LiDAR-Sensoren eingesetzt und hat zu einer Senkung der Produktionskosten beigetragen.
FMCW hingegen befindet sich noch in der Entwicklungsphase. Die Technologie ist komplex und erfordert spezifische und derzeit noch teure Laserquellen. Für den stark preisgetriebenen LiDAR-Markt, insbesondere in der Automobilindustrie, ist dies ein entscheidender Faktor. Dennoch könnten Fortschritte in der Entwicklung dazu führen, dass FMCW in Zukunft auf einem einzigen Chip integriert wird, was sowohl die Kosten als auch die Größe der Sensoren reduzieren würde.
Time-of-Flight immer noch etablierteres Messprinzip
Ist Frequenzmodulation also das bessere Messprinzip? Pauschal lässt sich das nicht sagen.
ToF bleibt derzeit die dominierende Wahl, da es kosteneffizient, zuverlässig und technologisch ausgereift ist. FMCW hingegen bietet spannende Vorteile, insbesondere durch die direkte Geschwindigkeitsmessung und eine hervorragende Signalqualität. Es ist jedoch noch zu teuer und komplex für eine breite Markteinführung.
Die Wahl zwischen ToF und FMCW hängt letztlich von den Anforderungen der jeweiligen Anwendung ab. Während ToF heute weit verbreitet ist, könnte FMCW mit weiteren technologischen Fortschritten in Zukunft eine zentrale Rolle im LiDAR-Markt spielen.