BlickfeldのLiDARセンサー技術は、価格、解像度、視野角の点で、まさに我々が求めていたものでした。
Matthias Blumenschein氏
アーヘン専門大学、鉄道車両工学研究助手

アーヘン専門大学を含む5つのパートナーで構成されるコンソーシアムは、貨物列車をバックさせる際に線路エリアを監視するための線路モニタリングシステム「SAMIRA Shunting Assistant System」を開発中です 。これは、LiDARの点群とカメラデータを融合させ、線路上の物体を確実に検出するものです。このデジタル化により、人的資源を節約すると同時に、鉄道の自律的な運用の基礎を築くことができます。
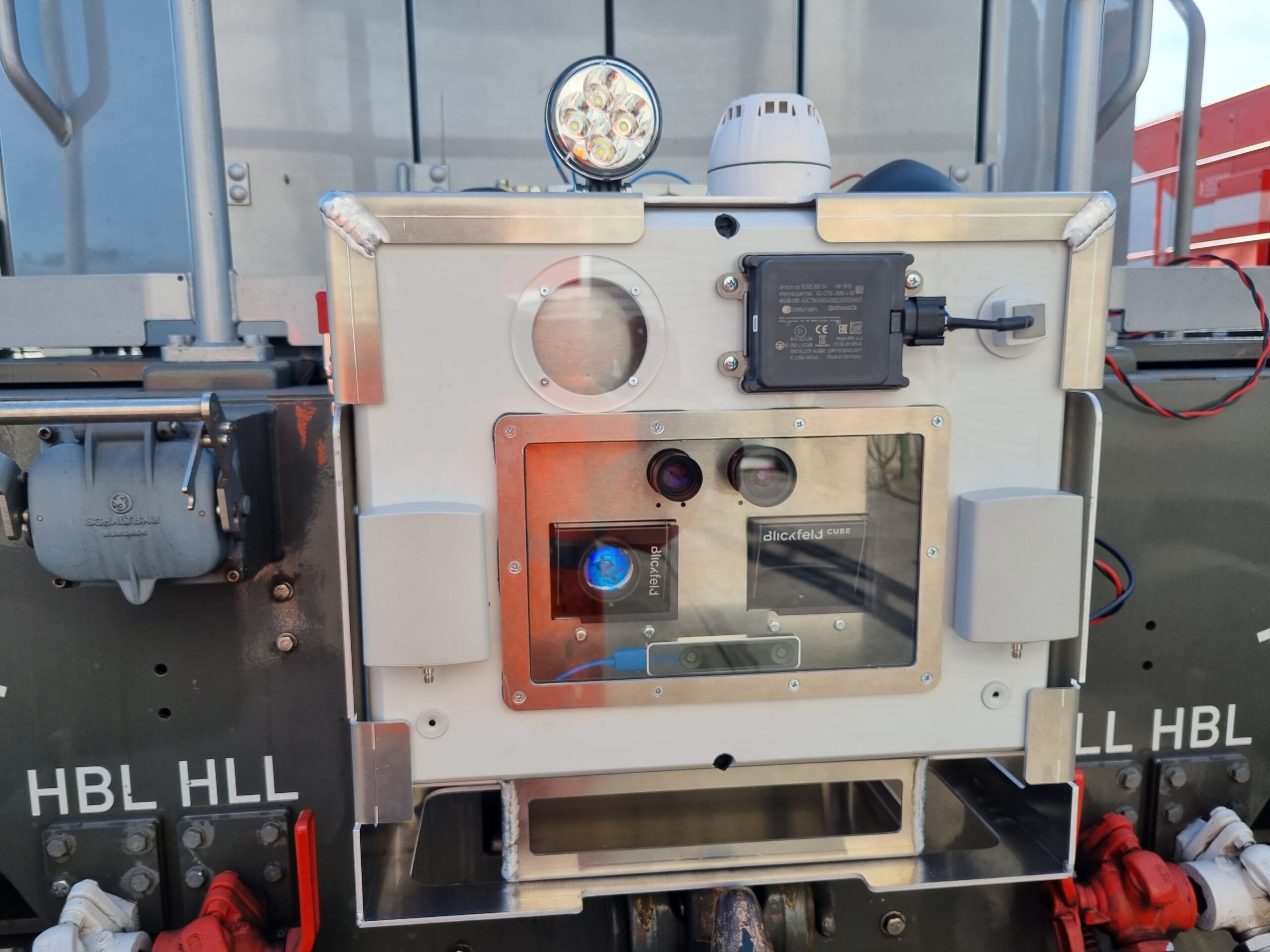
そこで当プロジェクトチームでは、貨物列車の入換時の線路モニタリングを代行し、機関車の運転士を補助する入換用アシストシステムを開発しました。携帯型のバッテリー駆動デバイスを列車の先端に取り付けます。この装置には、環境を検知するためのさまざまなセンサーと、データ処理用のコンピューターが組み込まれています。内蔵されているセンサーは、3D障害物検出用のBlickfeld LiDARセンサー2個、近距離検出用のステレオカメラ、アルゴリズムベースの物体検出のためのデータ基盤となる追加カメラ2個、そしてレーダーセンサーなどです。さらに、音響による警告信号も備えています。機関車の運転席にはタブレット端末が設置されており、ライブ映像で列車後方の軌道エリアを表示し、監視エリア内の物体、人、信号、他の車両を表示します。
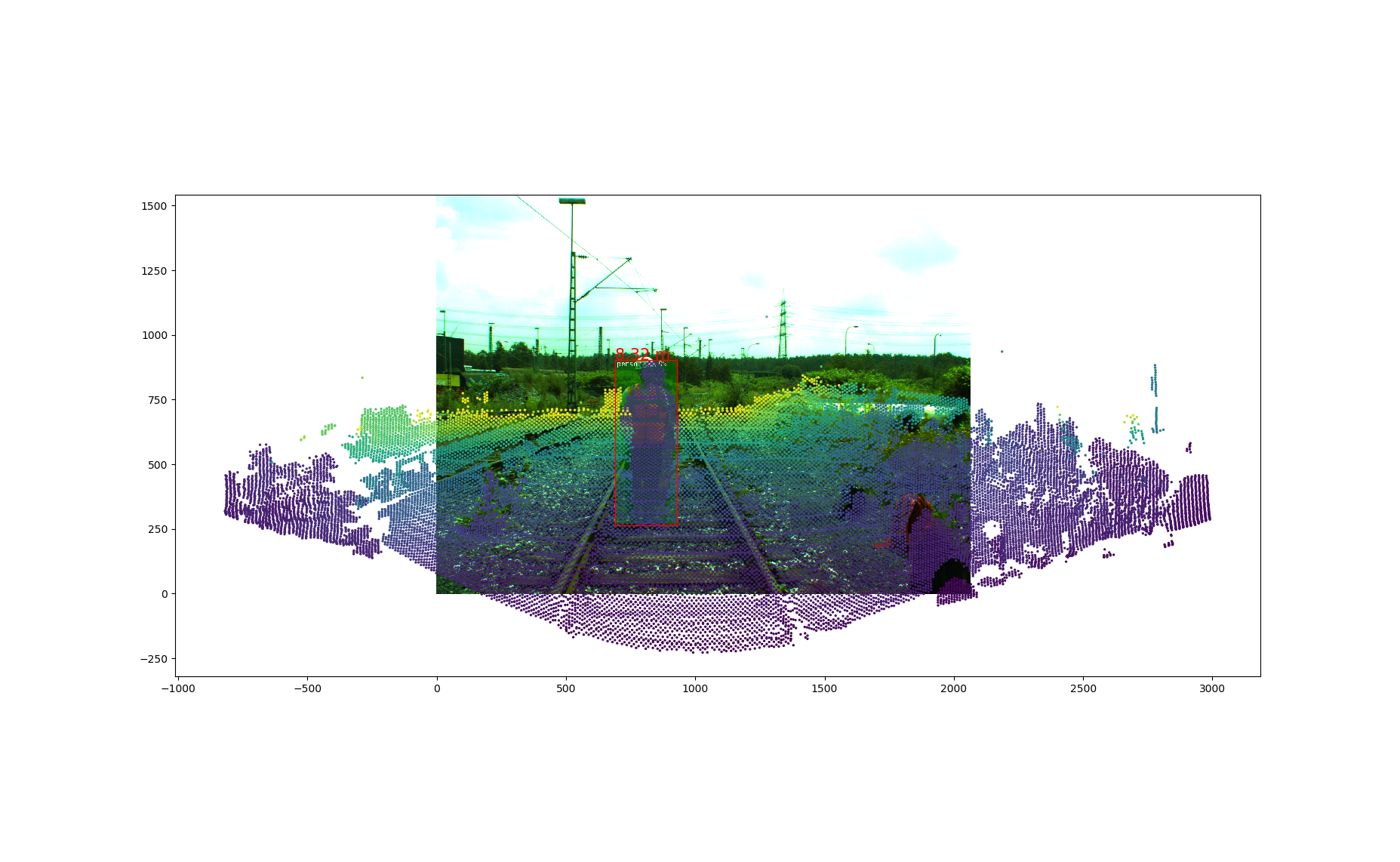
これらの物体は、カメラ画像と3次元点群の融合によって検出されます。画像認識アルゴリズムは、カメラ画像に基づいて軌道エリアと人や車両などの物体を識別します。 しかし、画像認識アルゴリズムでは、検出された物体の正確な位置を特定することはできませんので、点群との融合によってのみ、このステップが可能になります。このような方法により、列車が後退する際に、進路の確保が可能となり、進路変更時のアシストが不要となります。
LiDARとカメラシステムを担当するアーヘン専門大学は、いくつかの理由から、Blickfeldのセンサー技術をシステムに統合することを決定しました。 入換操作において、Cube 1の70°という水平視野角は、わずかなカーブを走行する際にも線路エリアを見張るのに理想的です。 また、鉄道の運行では振動が非常に大きいため、センサー技術には高い堅牢性が求められます。ここでは、Blickfeldセンサーのソリッドステート特性が大きな利点となります。さらに、点群データの高解像度を低価格で実現できることも特長です。