


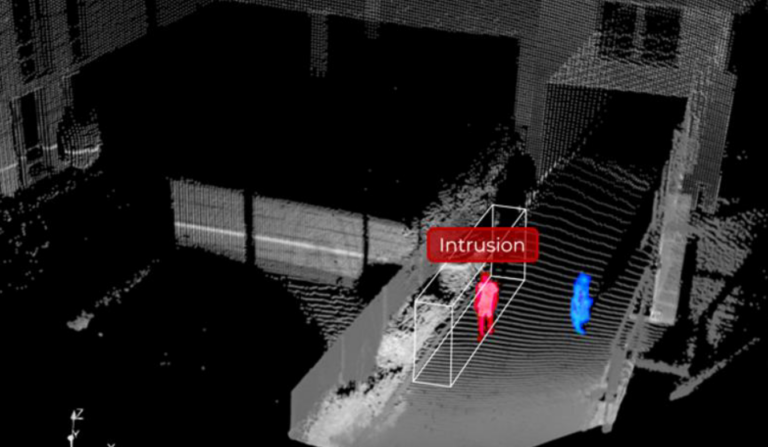
The Security Event: Blickfeld presents new 3D LiDAR for Highly Reliable Object Detection
LiDAR company Blickfeld will present its new Security 3D LiDAR “Blickfeld QbProtect” for the most demanding perimeter protection live at The Security Event in Birmingham.

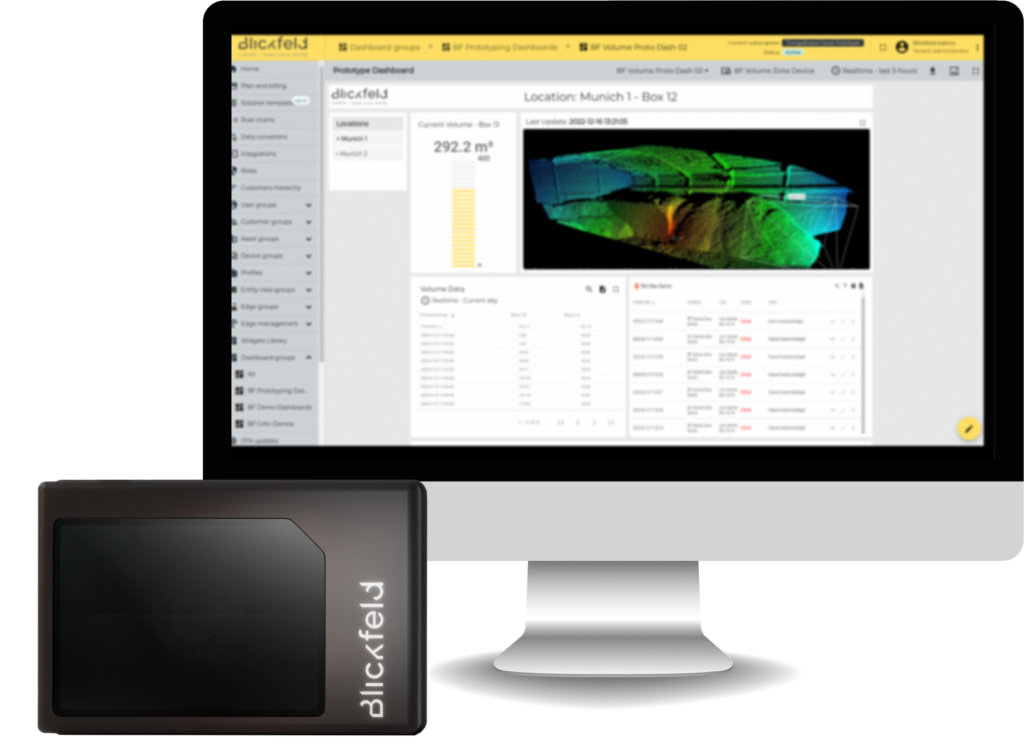
On-Demand Expert Talk: Volume Monitoring for Waste Management – A digital shift
Waste management facilities are valuable assets that need to be managed efficiently: Large, continuously increasing volumes of waste, often consisting of hazardous materials, are constantly

Focus on the customer: The Blickfeld Customer Service Team
A conversation with Fabian Wagner, Customer Service Engineer at Blickfeld At Blickfeld, Customer Service is more than just a service – it is a driving